Efforts sur une denture droite
Efforts sur les dentures
I. Cas des engrenages droit à denture droite
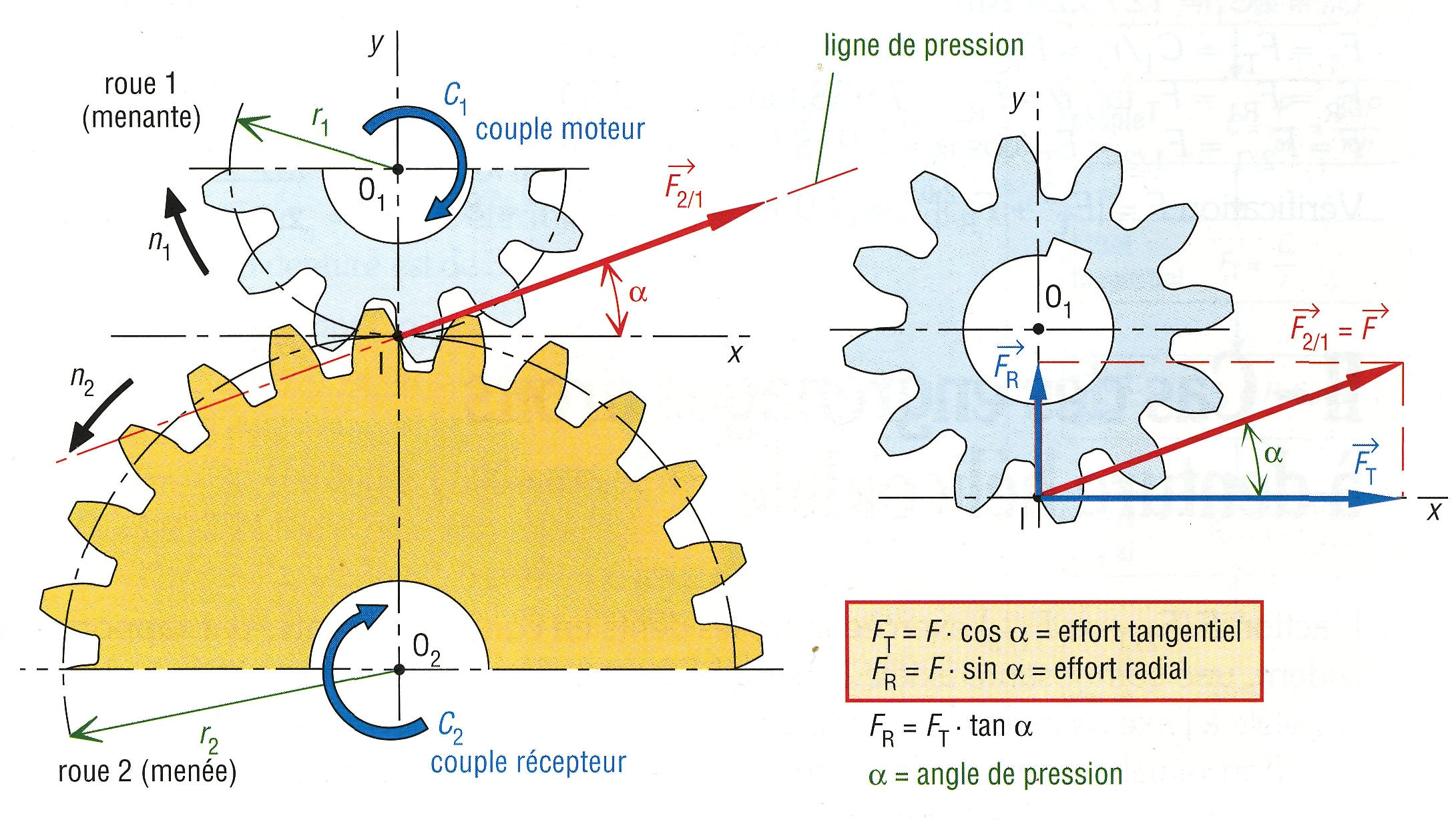
La roue 1 est supposée menante (motrice) et la roue 2 menée (réceptrice), r1 et r2 sont les rayons primitifs.
C1 est le couple moteur sur la
roue 1 et C2 le couple récepteur sur la roue 2.
P1 est la puissance motrice de la roue 1 et P2 la puissance réceptrice de la
roue 2.
Si le rendement est égal à 1 : P2 = P1.
P = C.ω
P1 = C1.ω1
P2 = C2.
Efforts sur une denture droite
1. Efforts de contact
a) Action de contact F2/1
Elle schématise l'action exercée par la roue 2 sur la roue 1. Elle est toujours portée par la ligne de pression (inclinée de l'angle de pression α et passant par I, point de contact entre cercles primitifs).
b) Effort tangentiel FT
II est obtenu en projetant F2/1 sur la tangente en I aux cercles primitifs. FT est à l'origine du couple transmis.
| FT = F2/1. cos α | C1 - FT.r1 | C2 = FT.r2 |
c) Effort radial FR :
perpendiculaire à FT, il est obtenu en projetant F2/1 sur O1O2.
Parfois appelé effort de séparation, il ne
participe pas à la transmission du couple
son action a tendance à séparer les deux roues et se traduit par un
fléchissement des arbres.
FR = F2/1.sinα:
2. Calcul de F2/1, FT et FR
L'organigramme proposé indique la procédure à suivre, connaissant la puissance d'entrée, la vitesse de rotation et l'angle de pression (la détermination de FT à partir du couple C est nécessaire pour obtenir FR et F2/1).
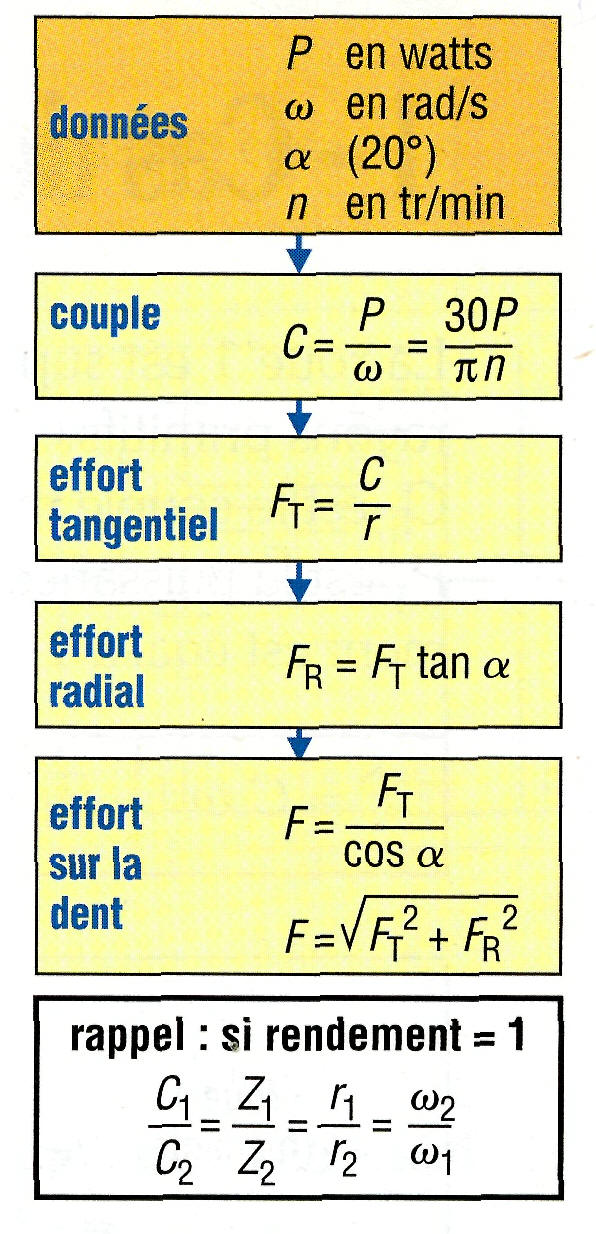
Organigramme de calcul

II. Cas des engrenages droits à denture hélicoïdale
L'action F (F2/1 ou F1/2) exercée entre les dents en contact présente, par rapport au cas précédent, une composante axiale FA supplémentaire due à l'inclinaison β de la denture.
FA est parallèle à l'axe de la roue et se transmet aux paliers par l'intermédiaire des arbres.
FR, effort radial passant par le centre de la roue, et FT, effort tangentiel transmettant le couple et la puissance, sont analogues au cas précédent des dentures droites. Ni FR, ni FA ne participent à la transmission du couple.
 |
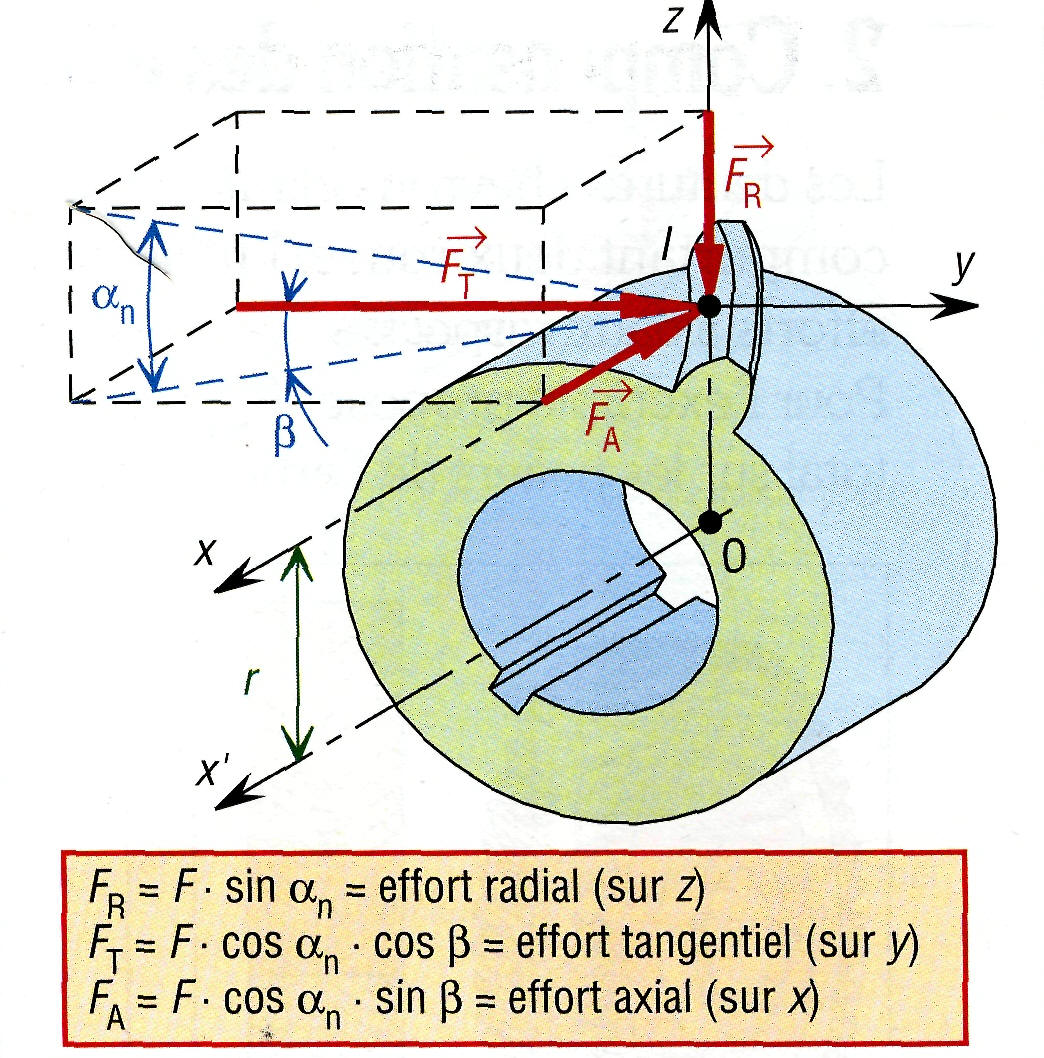 |
| Action F résultante sur une dent hélicoïdale | Composantes FT, FA, FR de F |
 |
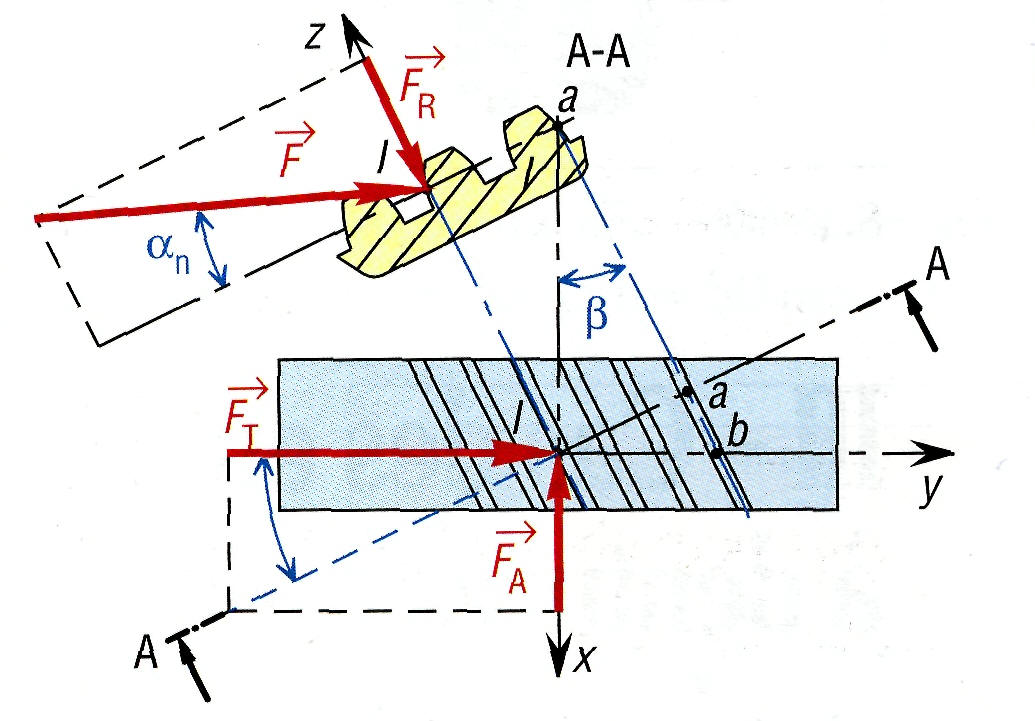 |
| Vues de FA et FT dans le plan (I, x, y) | Mise en évidence de F et FR dans le plan AA |
1. Calcul de FT, FR, FA et F
L'organigramme proposé indique la procédure à suivre, connaissant la puissance d'entrée, la vitesse de rotation, l'angle de pression normal αn {αt = angle de pression apparent) et l'angle d'inclinaison β.

Organigramme de calcul

2. Compensation des efforts axiaux FA
Les dentures chevrons éliminent les effets de l'effort axial sur les paliers. Pour un même arbre comportant deux roues, l'utilisation de sens d'hélices judicieusement choisis compense les efforts axiaux respectifs.
Pour l'exemple proposé, FA1/2 en A est compensé par FA4/3 en B ce qui donne un effort axial total sur les paliers de l'arbre intermédiaire : FA = FA1/2 - FA4/3.


Denture chevron.
Exemple de compensations des efforts axiaux de l'arbre intermédiaire
des roues 2 et 3
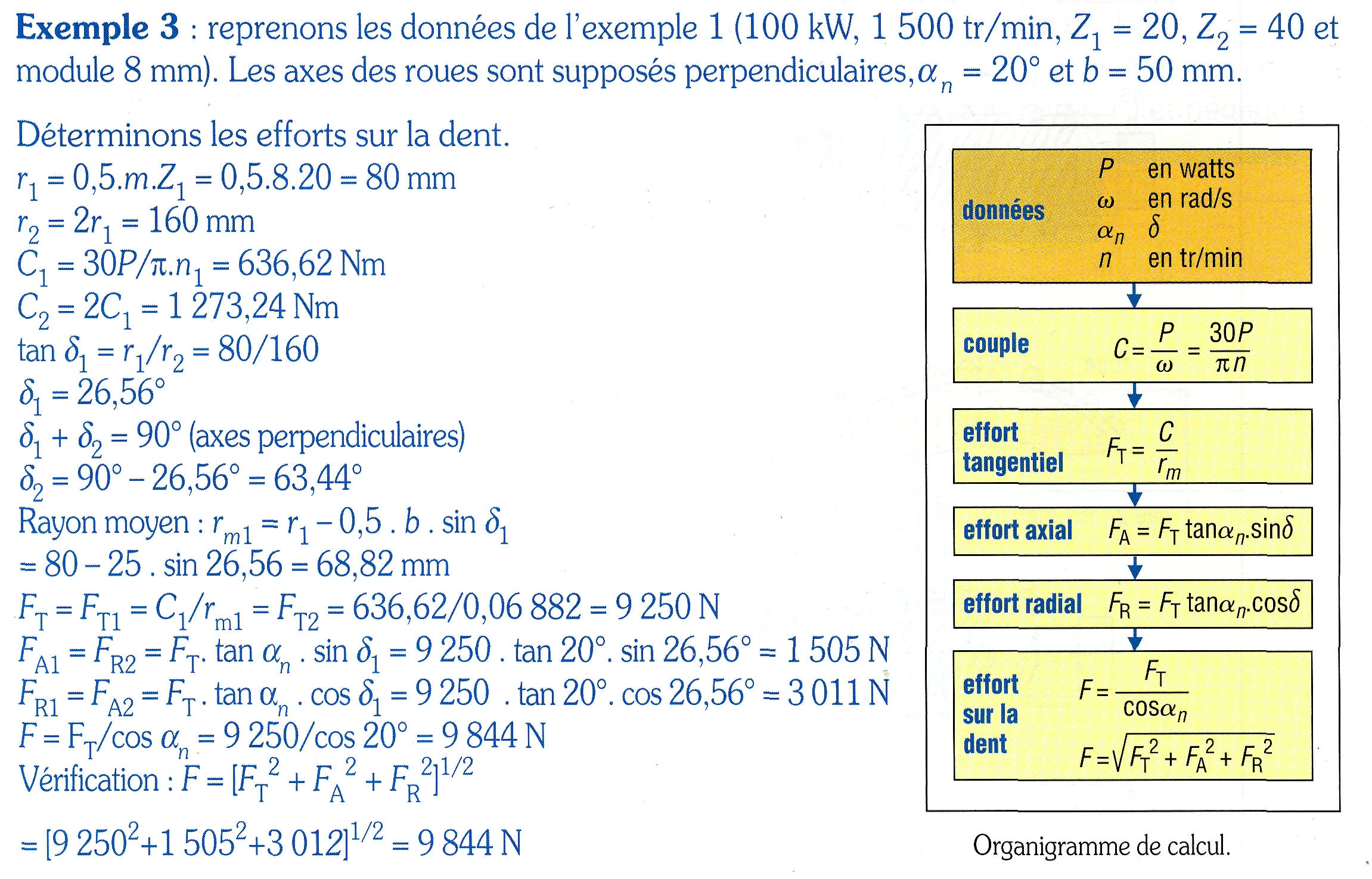
III. Cas des engrenages coniques à dentures droites

Efforts sur une denture conique
La forme conique des roues engendre des efforts axiaux FA.
Le point d'application I de l'effort F (F2/1) porté par KJ sur la dent est supposé situé au milieu de la denture (b/2 de chaque côté) et sur le cône primitif.
L'effort tangentiel FT dépend du rayon moyen rm et non pas du rayon primitif.
L'effort radial FR comme l'effort axial FA dépendent de l'angle 8 du cône primitif.

Vue spatiale des efforts exercés
Calcul des efforts
La procédure de détermination des efforts connaissant la puissance, la vitesse et les angles αn et δ est indiquée par l'organigramme proposé. FR et FA ne participent pas à la transmission du couple C.
Si les axes des deux roues sont perpendiculaires, l'effort axial sur la roue 1 devient l'effort radial sur la roue 2 et inversement (FA1 = -FR2 et FR1 = FA2)
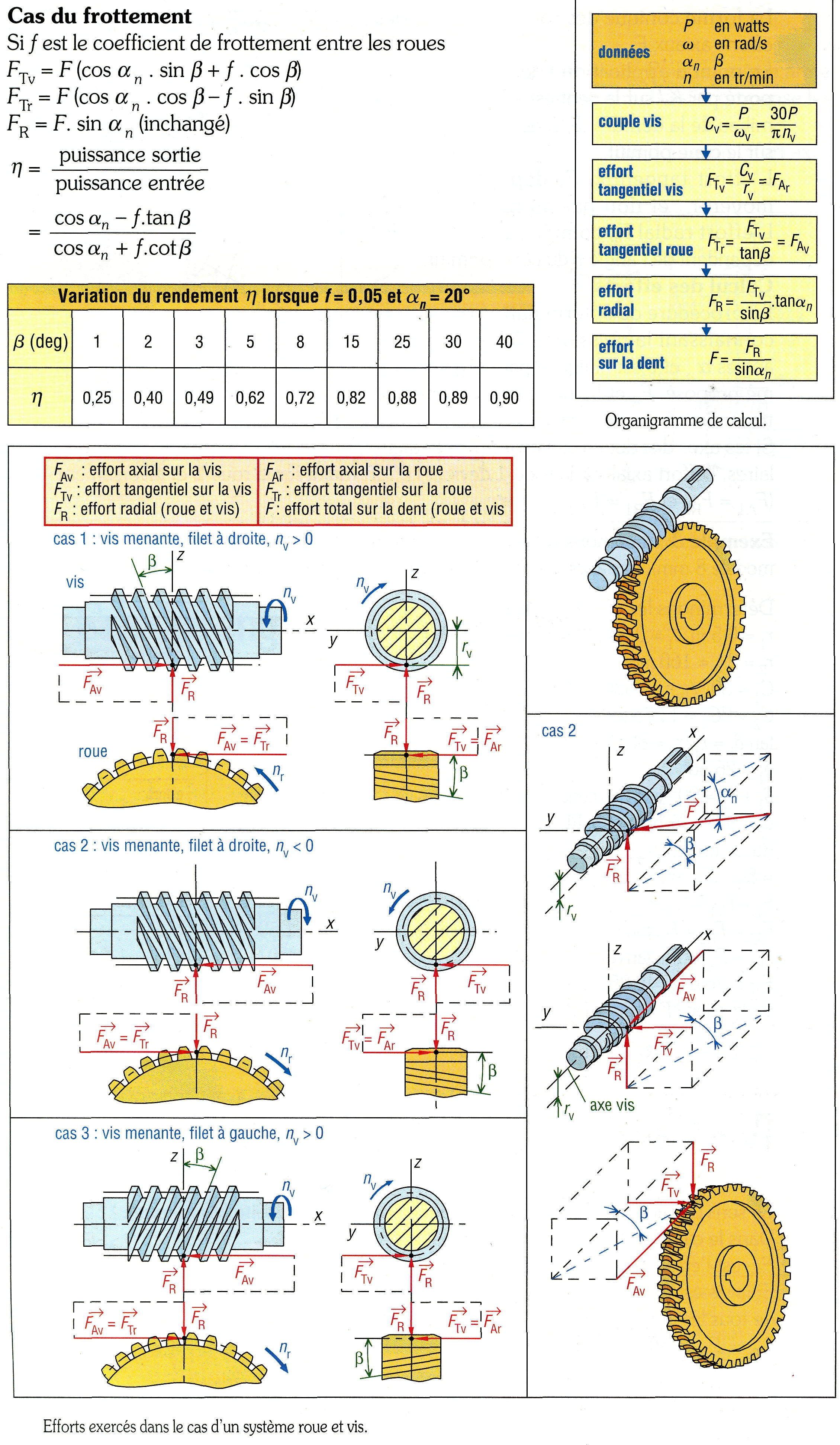
IV. Cas des engrenages à roue et vis sans fin
Le sens des actions FTr et FTv est indiqué pour un filet à droite (vis et roue).
Dans le cas d'un filet à gauche, ce sens doit être inversé. FTv est l'effort tangentiel sur la vis et FTr l'effort tangentiel sur la roue.
Si la vis est motrice ou menante, cas général, FTv créé par le couple moteur Cv est à l'origine, de tous les autres efforts.
FTv = FAr = effort axial sur la roue
FTr = FAV = l'effort axial sur la vis
La procédure de détermination des efforts est indiquée par l'organigramme proposé. Les formules indiquées ne tiennent pas compte du frottement.
V. Calcul de la résistance de la dent
La conception d'un engrenage passe par la détermination de l'épaisseur de la dent, du module à partir de l'effort F (F2/1) exercé entre les roues et des conditions de service.
Cette détermination conduit à deux types de calculs :
- Un calcul de contrainte au pied de la dent (zone fragile).
- Un calcul de résistance (usure, fatigue...) dans la zone de contact entre dents.
Remarques
-L'application des méthodes de calcul normalisées (ISO, AGMA...) est en
général un parcours difficile semés de tâtonnements, choix, essais, erreurs et
jugements qui exigent de l'expérience (voir ouvrages spécialisés).
- Les méthodes abordées dans ce paragraphe, limitées au calcul des contraintes, sont des méthodes approchées permettant une approximation ou une étude simplifiée ; elles ne peuvent pas être utilisées pour des applications importantes.
1. Méthode de Lewis : cas d'un engrenage droit à denture droite
Cette méthode est à l'origine des autres méthodes. Sa formule a été établie en 1892. Elle est encore utilisée aujourd'hui pour des approximations et des études simplifiées.
Inconvénients :
méthode majorante, supposant une seule dent en prise ; ne tient pas compte du phénomène de concentration de contraintes au pied de la dent (rayon rf) et néglige les conditions de service (chocs, fatigue...)

Efforts exercés sur une dent
a) Principe :
la dent est calculée en flexion comme une poutre encastrée soumise à l'effort F supposé situé à son extrémité E (ou E').
F peut être remplacé par ses composantes FT et FR. Les effets de FR beaucoup plus faibles sont négligés.
La résistance des matériaux (cours de flexion) montre que la contrainte de flexion est maximale en I (ou I', racine de la dent) et qu'en ce point :
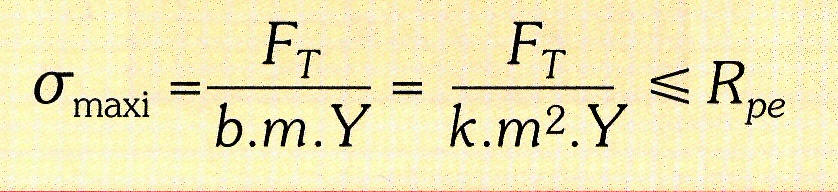
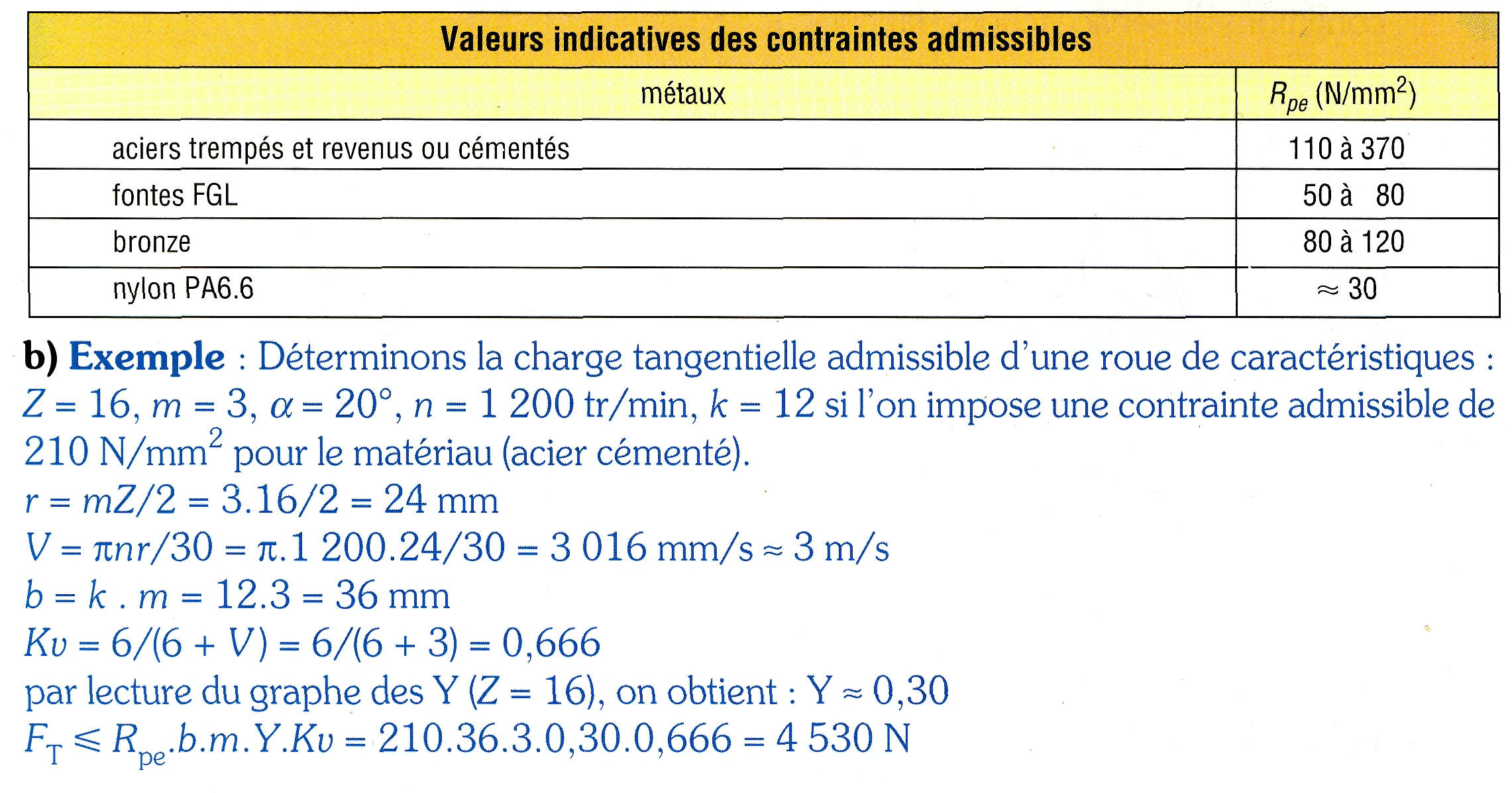
b = k . m : largeur de la dent
m : module
Rpe : contrainte admissible par le matériau (traction)
La valeur de Y dépend de l'angle de pression a et du nombre de dents Z
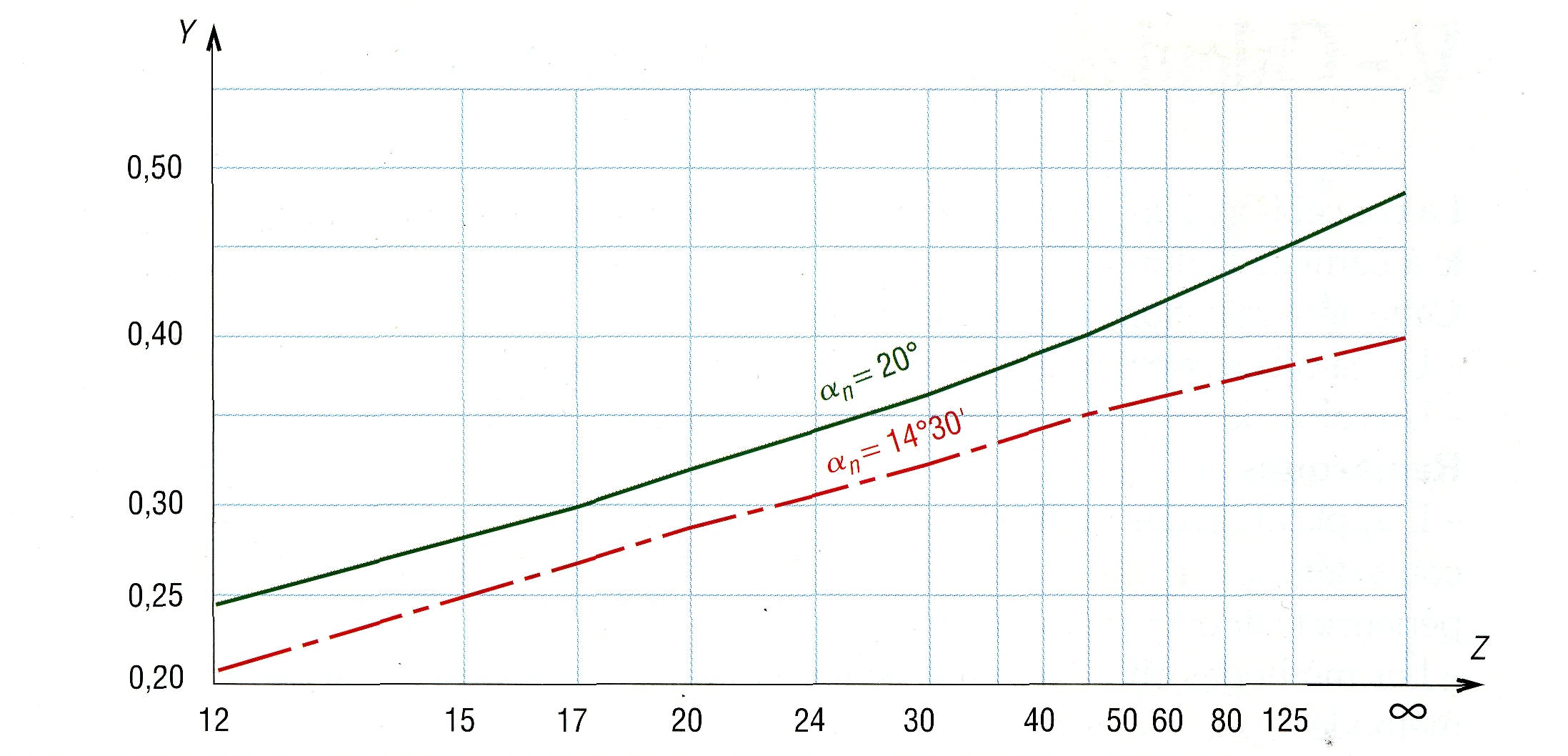
Valeur du coefficient Y
Au besoin, un coefficient correcteur (Kv) permet de tenir compte des effets de la vitesse circonférentielle au diamètre primitif (V = 7πnr/30) :

2. Méthode de Lewis :
cas d'un engrenage droit à denture hélicoïdale
En remarquant que :
[F'T/b' = (FT/cos β)/(b/cos β) = FT/b], la formule précédente est conservée en remplaçant le module m par le module réel mn et en remplaçant Z par le nombre de dent équivalent Ze (voir : Engrenage droit à denture hélicoïdale, paragraphe 3).

![]()