Moteurs asynchrones triphasés
Les moteurs asynchrones triphasés sont les moteurs employés le plus fréquemment dans l'industrie. Ils possèdent en effet plusieurs avantages: simplicité, robustesse, prix peu élevé et entretien facile. Vu l'importance de ces moteurs, nous leur consacrerons trois secttions.
Dans cette section, nous étudierons la construction et les principes fondamentaux des moteurs asynchrones triphasés lorsqu'ils fonctionnent à fréquence fixe.
Nous développerons les équations simples qui décrivent leur fonctionnement, et nous expliquerons l'agencement des enroulements.
Dans les deux sections suivantes, nous étudierons les applications de ces machines, leur circuit équivalent et leur fonctionnement lorsqu'ils sont alimentés à fréquence variable.
Parties principales
Le moteur asynchrone triphasé (parfois appelé moteur d'induction triphasé) comprend deux parties :
le stator (fixe) et le rotor (tournant).
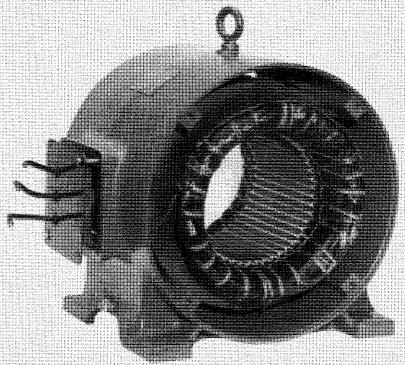
Le stator comporte une carcasse en acier renfermant un empilage de tôles identiques qui constituent un cylindre vide; ces tôles sont percées de trous à leur périphérie intérieure.
L'alignement de ces trous forme des encoches dans lesquelles on loge un bobinage triphasé (Fig. 33-1).
Figure 33-1 Vue du stator d'un moteur asynchrone triphasé à cage d'écureuil de 2 kW, 1725 r/min. Les bobines du stator sont serrées dans les 48 encoches par des cales de fibre.
Ensuite, le tout est trempé dans un vernis chaud qui pénètre jusqu'au fond des encoches et imprègne le bobinage au complet. Il en résulte une masse solide pouvant résister aux vibrations tout en offrant une bonne conduction de la chaleur vers l'extérieur de la machine. Les trois phases sont connectées en étoile et seulement trois fils sortent à l'extérieur
Le rotor se compose d'un cylindre de tôles poinçonnées à leur périphérie extérieure pour former les encoches destinées à recevoir des conducteurs. Il est séparé du stator par un entrefer très court - de l'ordre de 0,4 à 2 mm seulement.
Il existe deux types de rotors : le rotor à cage d'écureuil et le rotor bobiné.
L'enroulement du rotor à cage d'écureuil (Fig. 33-2) est constitué de barres de cuivre nues introduites dans les encoches; ces barres sont soudées à chaque extrémité à deux anneaux qui les court-circuitent.
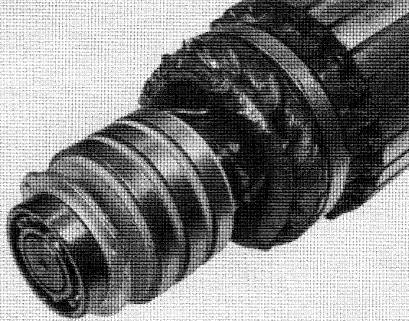
Figure 33-2 Les 52 encoches du rotor sont fermées, ce qui explique la surface lisse extérieure. Les 52 barres de cuivre sont glissées à l'intérieur des encoches puis soudées aux anneaux extérieurs. Le ventilateur de gauche sert au refroidissement du moteur et le roulement à billes de droite maintient le rotor bien centré afin qu'il ne vienne pas frotter contre le stator
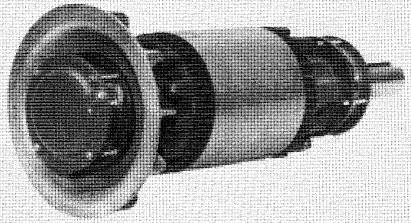
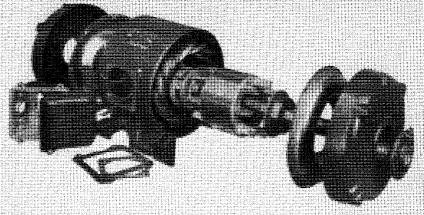
L'ensemble ressemble à une cage d'écureuil d'où le nom de rotor à cage d'écureuil, ou simplement rotor à cage. Dans les moteurs de petite et moyenne puissance, les barres et les anneaux sont formés d'un seul bloc d'aluminium coulé (Fig. 33-3).
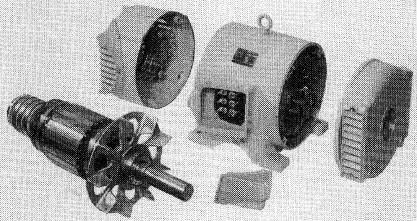
Figure 33-3 Vue éclatée d'un moteur asynchrone dont le rotor possède une cage d'écureuil en aluminium coulé. Les anneaux coulés à chaque extrémité servent aussi de ventilateur.
Les Fig. 33-4 et 33-5 montrent les différents stades de fabrication d'un moteur à cage d'écureuil.
Figure 33-4 Étapes de fabrication des laminations du stator et du rotor d'un moteur à cage d'écureuil.
La feuille d'acier est coupée en carré (1) ;
les coins sont arrondis et le trou de l'arbre est percé (2);
les encoches du stator sont perforées (3);
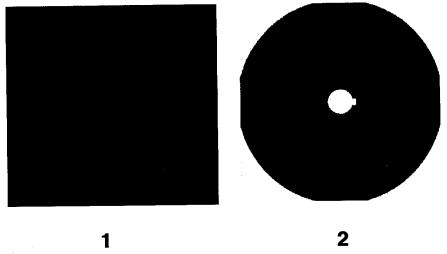
le diamètre intérieur est découpé, formant du même coup les laminations du rotor et du stator (4);
les encoches du rotor sont perforées (5).
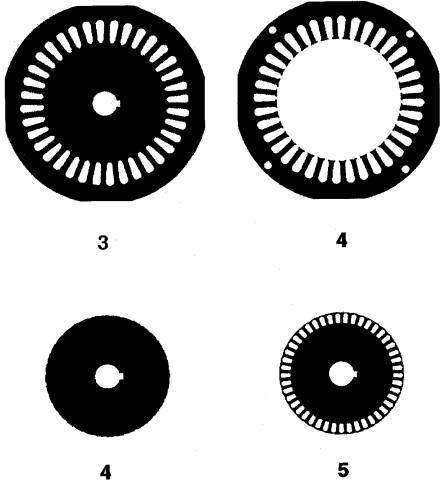
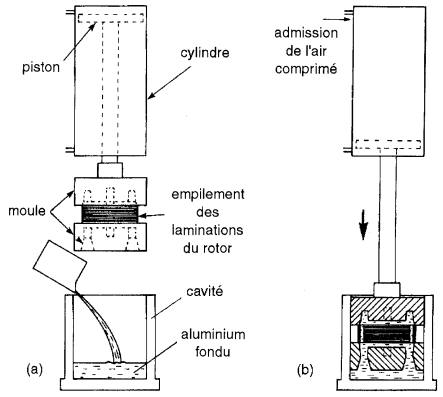
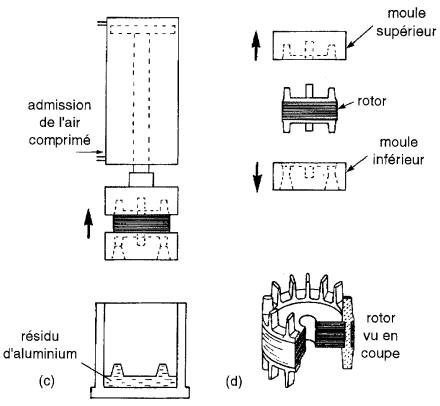
Figure 33-5 Étapes du moulage d'une cage d'écureuil :
a) On coule de l'aluminium fondu dans une cavité cylindrique. Les laminations empilées du rotor sont retenues entre deux moules.
b) Sous l'action de l'air comprimé, un piston enfonce les laminations dans la cavité. L'aluminium fondu est ainsi injecté dans les ouvertures des moules et dans les encoches du rotor.
c) Le piston remonte et retire le rotor, les moules et l'aluminium figé qu'ils contiennent d) Les moules sont enlevés, dégageant le rotor et sa cage d'écureuil.
Le rotor bobiné comprend un bobinage triphasé, semblable à celui du stator, placé dans les encoches.
Il est composé de trois enroulements raccordés en étoile ; l'extrémité libre de chaque enroulement est reliée à une bague tournant avec l'arbre (Fig. 33-6).
Figure 33-6
a) Vue éclatée d'un moteur asynchrone à rotor bobiné de 5 kW, 1730 r/min.
b) Vue agrandie des bagues du rotor
Ces bagues permettent, par l'intermédiaire de trois balais, d'insérer une résistance extérieure en série avec chacun des trois enroulements lors du démarrage du moteur.
En fonctionnement normal, les trois balais sont court-circuités.
Principe de fonctionnement du moteur asynchrone Le fonctionnement du moteur asynchrone triphasé est basé sur l'application des principes I, II et III de l'électromagnétisme.
On peut le comprendre à l'aide de l'exemple suivant.
Considérons une série de conducteurs de longueur l dont les extrémités sont court-circuitées par deux barres conductrices A et B (Fig. 33-7).
Figure 33-7 Un aimant permanent qui se déplace vers la droite tend à entraîner l'échelle conductrice
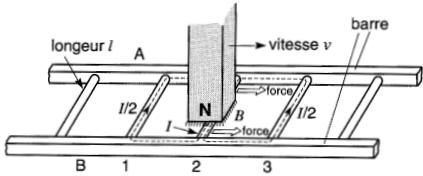
Un aimant permanent, placé au-dessus de cette «échelle», se déplace rapidement vers la droite à une vitesse v, de sorte que son champ magnétique B coupe les conducteurs à tour de rôle.
D'après le principe III, une tension E = Blv est induite dans chacun des conducteurs coupé par le champ.
D'autre part, puisque le circuit est fermé par les barres et les autres conducteurs, un courant I se met à circuler dans le conducteur qui est momentanément en dessous de l'aimant (Fig. 33-7).
Ce courant traverse le champ magnétique de l'aimant permanent, de sorte que, d'après le principe II, le conducteur est soumis à une force mécanique. Cette force agit toujours dans une direction telle qu'elle entraîne le conducteur dans le sens de déplacement du champ.
Si «l'échelle» de conducteurs était libre de se déplacer, elle accélérerait vers la droite.
Cependant, à mesure qu'elle gagne de la vitesse, la «coupure» des conducteurs par le champ magnétique se fait moins rapidement et la tension induite diminue, de même que le courant I.
Par conséquent, la force agissant sur les conducteurs situés en dessous de l'aimant diminue.
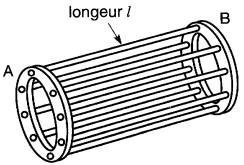
Si l'échelle se déplaçait à la même vitesse que le champ, la tension induite, le courant I et la force deviendraient nuls. Dans le moteur asynchrone, l'échelle est recourbée sur elle-même pour former une cage d'écureuil (Fig. 33-8) et l'aimant est remplacé par un champ tournant qui coupe les conducteurs du rotor.
Figure 33-8 Une échelle conductrice recourbée sur elle-même forme une cage d'écureuil
Ce champ tournant est créé par l'ensemble des courants triphasés circulant dans les trois enroulements du stator.
Champ tournant
Considérons un stator élémentaire comportant 6 pôles saillants et bobiné de la façon indiquée à la Fig. 33-9.
Figure 33-9 Stator élémentaire dont les enroulements sont connectés en étoile. Les bornes A, B, C sont raccordées à une source triphasée (pas montrée)
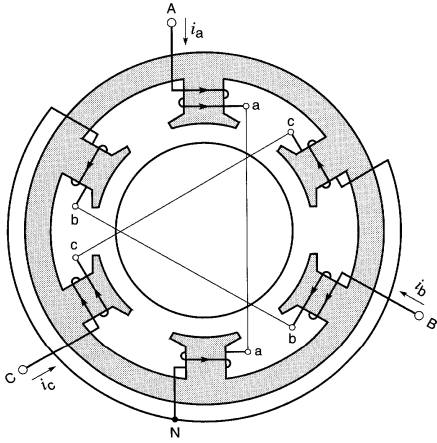
Trois enroulements identiques Aa-aN, Bb-bN et Cc-cN, composés de 2 bobines en série (pôles nord et sud), sont disposés à 120° l'un de l'autre dans l'espace.
Les extrémités N sont reliées pour former un montage en étoile.
À cause de la symétrie parfaite des enroulements, les impédances entre les bornes A, B, C et le neutre N sont identiques.
Les trois bobines dont les bornes sont A, B, C constituent donc une charge triphasée équilibrée. Par conséquent, si l'on applique une source de tension triphasée aux bornes A, B et C, des courants alternatifs identiques Ia, Ib et Ic déphasés de 120° dans le temps traversent les bobines (Fig. 33-10).
Figure 33-10 Courants instantanés circulant dans les enroulements de la figure 33-9, et position correspondante du champ magnétique
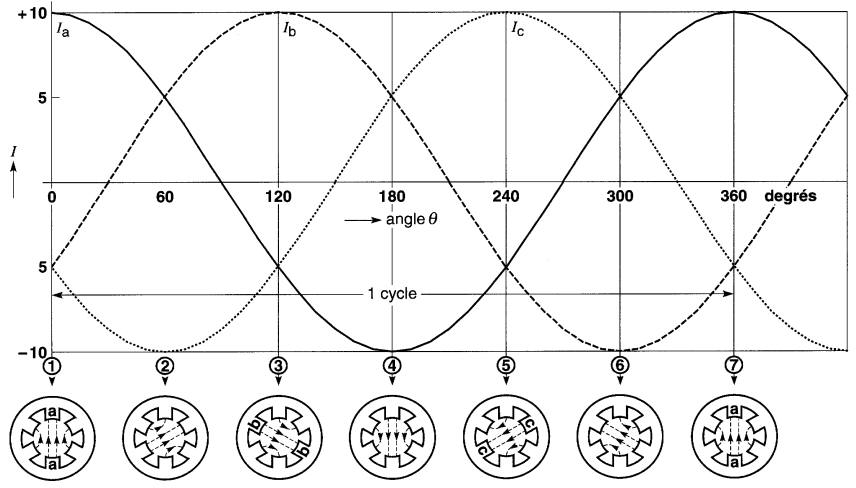
Ces courants produisent des forces magnétomotrices qui engendrent des flux. Ce sont les flux qui nous intéressent. Afin de suivre la séquence des événements, nous supposons que les courants sont positifs lorsqu'ils circulent d'une ligne vers le neutre N.
Un courant négatif circule donc du neutre vers la ligne. Supposons que chaque bobine possède 5 spires et que le courant crête par phase soit de 10 A.
Ainsi, lorsque Ia = +7 A, les deux bobines de la phase A produisent ensemble une FMM de 7 A x 10 spires = 70 A et un flux d'une valeur correspondante.
Puisque le courant est positif, il produit un flux qui se dirige verticalement vers le haut, d'après la règle de la main droite.
En observant, à différents instants, la valeur et le sens du courant dans chacune des bobines, on peut établir les directions successives du champ magnétique résultant (Fig. 33-10).
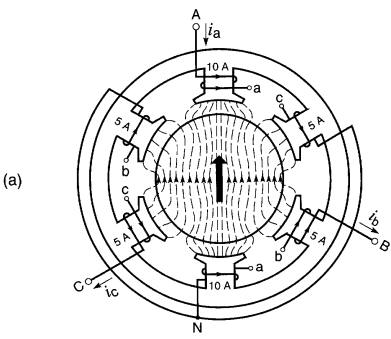
À l'instant 1, par exemple, le courant Ia a une valeur de +10 A alors que les courants Ib et le ont chacun -5 A.
La FMM de la phase A vaut alors: 10 A x 10 = 100 A; celles des phases B et C, 50 A chacune. La direction du flux étant imposée par le sens des courants, le champ doit avoir l'allure indiquée à la Fig. 33-11a.
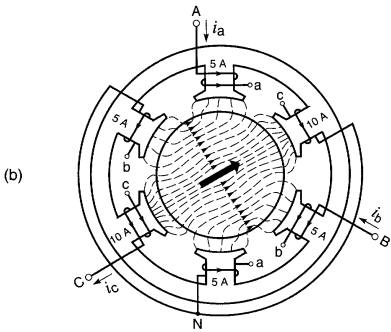
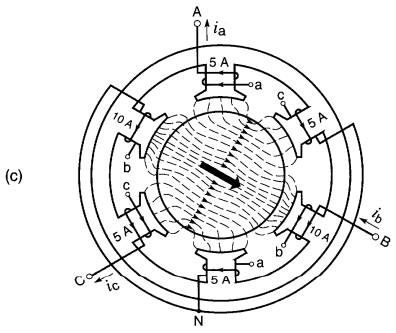
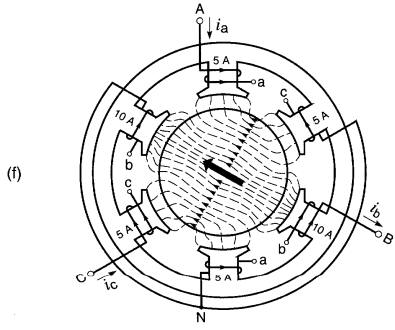
Figure 33-11
a. Champ magnétique à l'instant 1 ; l'orientation est verticale
b. Le champ magnétique à l'instant 2 est identique à celui de l'instant 1, sauf qu'il a tourné d'un angle de 60°.
c. Champ magnétique à l'instant 3.
d. Champ magnétique à l'instant 4.
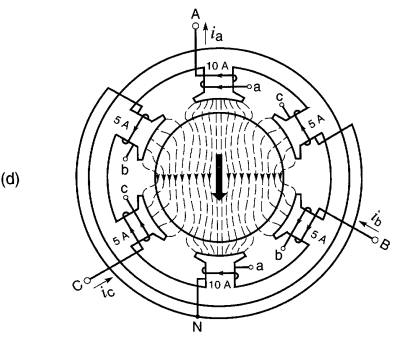
e. Champ magnétique à l'instant 5
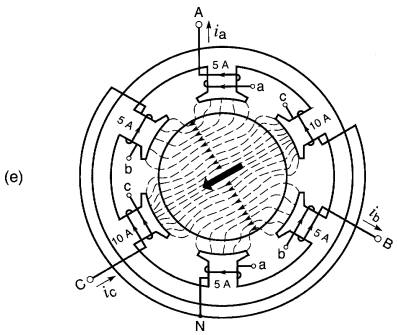
f. Champ magnétique à l'instant 6. Le flux a exécuté 5/6 de tour depuis l'instant 1.
On remarque que les six pôles produisent un champ résultant qui équivaut à celui que donneraient un seul pôle nord et un seul pôle sud.
À l'instant 2, soit un sixième de cycle plus tard, le courant le atteint sa valeur crête de -10 A, tandis que les valeurs Ia et Ib sont de +5 A chacune (voir Fig. 33-10).
Comme précédemment, on détermine la valeur des FMM et l'on constate que le champ garde la même allure, sauf qu'il s'est déplacé (dans l'espace) d'un angle de 60°.
En d'autres termes, le flux a effectué 1/6 de tour entre les instants 1 et 2.
En procédant ainsi pour chacun des instants 3, 4, 5, 6 et 7, séparés par des intervalles de 1/6 de cycle, on constate que le champ résultant exécute un tour complet pendant un cycle (Fig. 33-11a à 33-11f).
La vitesse de rotation du champ dépend donc de la fréquence de la source qui alimente le moteur.
Si la fréquence des courants est de 60 Hz, le champ fait un tour complet en 1/60 s, ce qui équivaut à 60 tours par seconde ou 3600 tours en une minute.
Par contre, si la fréquence est de 5 Hz, le champ effectue un tour en 1/5 s, ce qui donne une vitesse de rotation de 300 r/min seulement.
Puisque la vitesse de rotation du champ est forcément synchronisée avec la fréquence du réseau, on l'appelle vitesse synchrone.
Sens de rotation
Les valeurs maximales des courants de la Fig. 33-10 se succèdent dans l'ordre A-B-C. On observe que, pour une telle séquence des phases, le champ tourne dans le sens horaire.
Si l'on intervertit deux des fils de ligne alimentant le stator, la nouvelle séquence sera A-C-B. En suivant un raisonnement analogue à celui de la section Champ tournant, on constaterait que le champ tourne à la vitesse synchrone dans le sens antihoraire, ce qui change le sens de rotation du moteur.
Nombre de pôles - vitesse synchrone
Les stators des anciennes machines avaient des pôles saillants, mais les stators modernes sont lisses . Ainsi, le stator de la Fig. 33-9 est plutôt construit comme celui montré à la Fig. 33-12.
Les deux bobines originales Aa et aN constituent alors ce qu'on appelle les groupes 1 et 2 de la phase A (Fig. 33-12a).
Figure 33-12a Le groupe 1 de la phase A est composé de 5 bobines réparties dans les encoches du stator. Les bobines sont raccordées en série.
Le groupe 2 est identique au groupe 1. Les deux groupes produisent un pôle N et un pôle S lorsque le courant circule dans les bobines. On montre en lignes pointillées le spectre du champ créé par la phase A
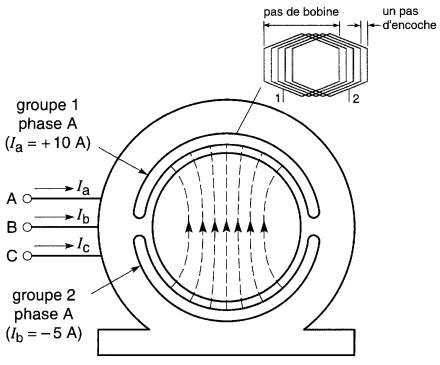
Un groupe est donc équivalent à un pôle saillant. Chaque groupe est composé de 2, 3 ou plusieurs bobines disposées dans des encoches successives et raccordées en série.
Par exemple, le groupe 1 de la Fig . 33-12a est composé de 5 bobines distribuées dans 10 encoches . Les cinq bobines ensemble constituent un pôle.
De la même façon, les cinq bobines du groupe 2 constituent un pôle. Lorsque le courant Ia circule dans les deux groupes, il produit le flux montré dans la Fig. 33-12a.
Les groupes des deux autres phases sont identiques à ceux de la phase A, mais ils sont disposés à 120° l'un de l'autre (Fig. 33-12b).
Figure 33-12b Stator bipolaire montrant la disposition des groupes des trois phases. Le champ magnétique résultant correspond à l'instant où Ia = + 10A et Ib = Ic = -5A.
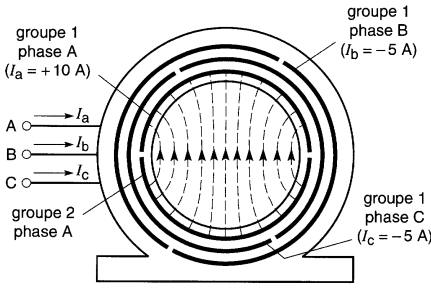
Le champ créé par l'ensemble des trois phases forme encore 2 pôles (Fig . 33-12b).
Lorsque les enroulements d'un stator sont arrangés pour former 2 pôles par phase (6 pôles en tout), on obtient un champ tournant bipolaire. En disposant plusieurs groupes de pôles sur le stator, on obtient un spectre magnétique multipolaire.
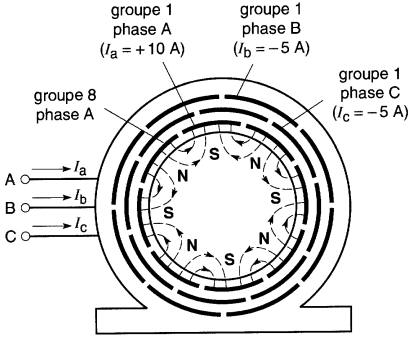
Ainsi, une machine triphasée ayant 8 groupes par phase (soit 24 groupes au total) produit un champ tournant à 8 pôles ; on l'appelle alors machine à 8 pôles (Fig . 33-13).
Figure 33-13 Stator triphasé à 8 pôles et champ magnétique résultant à l'instant où Ia = + 10 A et Ib = Ic = -5 A.
Le nombre de pôles du champ tournant est toujours égal au nombre de groupes par phase.
Pour une même fréquence d'alimentation, la vitesse de rotation d'un champ multipolaire est inférieure à celle d'un champ bipolaire.
On a vu que, pour une machine bipolaire, le champ tournant exécute un tour pendant un cycle.
On peut démontrer que dans une machine à 8 pôles, le champ exécute 1/4 de tour seule- ment pendant 1 cycle. Sur un réseau à 60 Hz, la vitesse synchrone est alors 1/4 de tour par 1/60 s, ou 900 r/min.
Les 8 pôles de la Fig. 33-13 produisent un spectre magnétique qui ressemble à une roue à 8 rayons, tournant à une vitesse de 900 r/min. La vitesse de rotation du champ dépend donc de la fréquence de la source et du nombre de pôles du stator.
Sa valeur est donnée par la formule:
ns = 120f / P (33-1)
où
ns
=
vitesse synchrone, en tours par minute [r/min]
f = fréquence de la source, en hertz [Hz]
p = nombre de pôles par phase
Lorsqu'on donne le nombre de paires de pôles p', la formule devient ns = 60f / p'.
Cette expression indique que la vitesse synchrone augmente avec la fréquence, mais diminue avec le nombre de pôles. Le nombre de pôles est toujours un chiffre pair car un pôle N est toujours accompagné d'un pôle S.
Exemple 33-1
Un moteur asynchrone possédant 20 pôles par phase est alimenté par une source triphasée à 50 Hz.
Calculer la vitesse synchrone.
Solution
La valeur de la vitesse synchrone est:
ns = 120f / p = 120 x 50 / 20 = 300 r/min
Démarrage du moteur à cage d'écureuil