Moteurs asynchrones
Machines à courant alternatif 1955
A. Moteurs asynchrones à courant polyphasé {polyphasé asynchronous motors)
On appelle moteur asynchrone
tout moteur à courant alternatif dont la vitesse de rotation diffère de la
vitesse synchrone obtenue par la formule:
N = 120f / P
La vitesse de rotation des moteurs d'induction est inférieure à la vitesse synchrone; on dit que leurs rotors glissent. A vide, le glissement est minime mais il augmente légèrement avec la charge.
La vitesse des moteurs à courant triphasé à collecteur, à répulsion et série peut être au-dessus de la vitesse synchrone.
On utilise beaucoup plus les moteurs asynchrones que les moteurs synchrones.
1. Moteur à courant triphasé d'induction à rotor à cage d'écureuil (classe A) (three-phase squirrel-cage induction-motor)
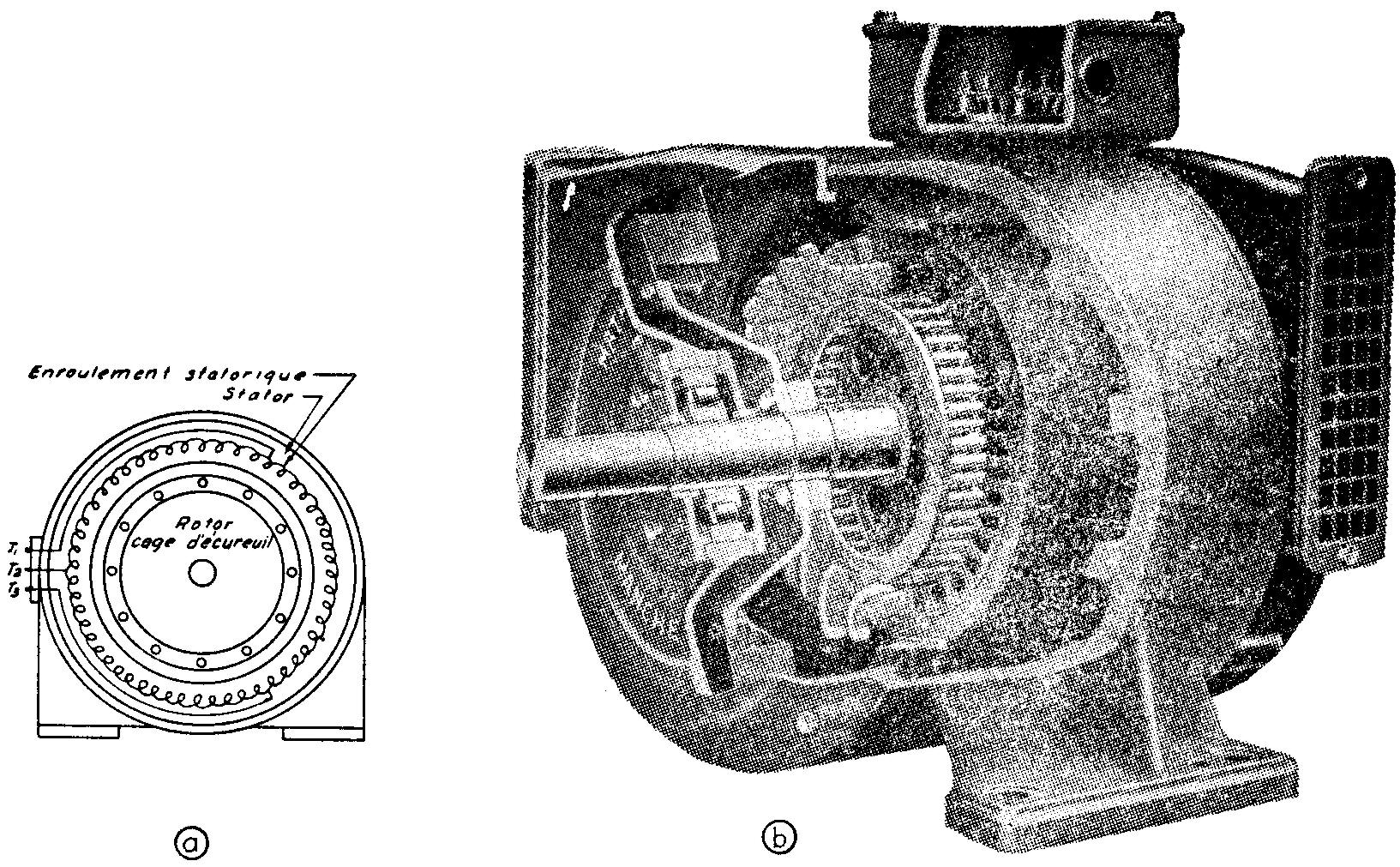
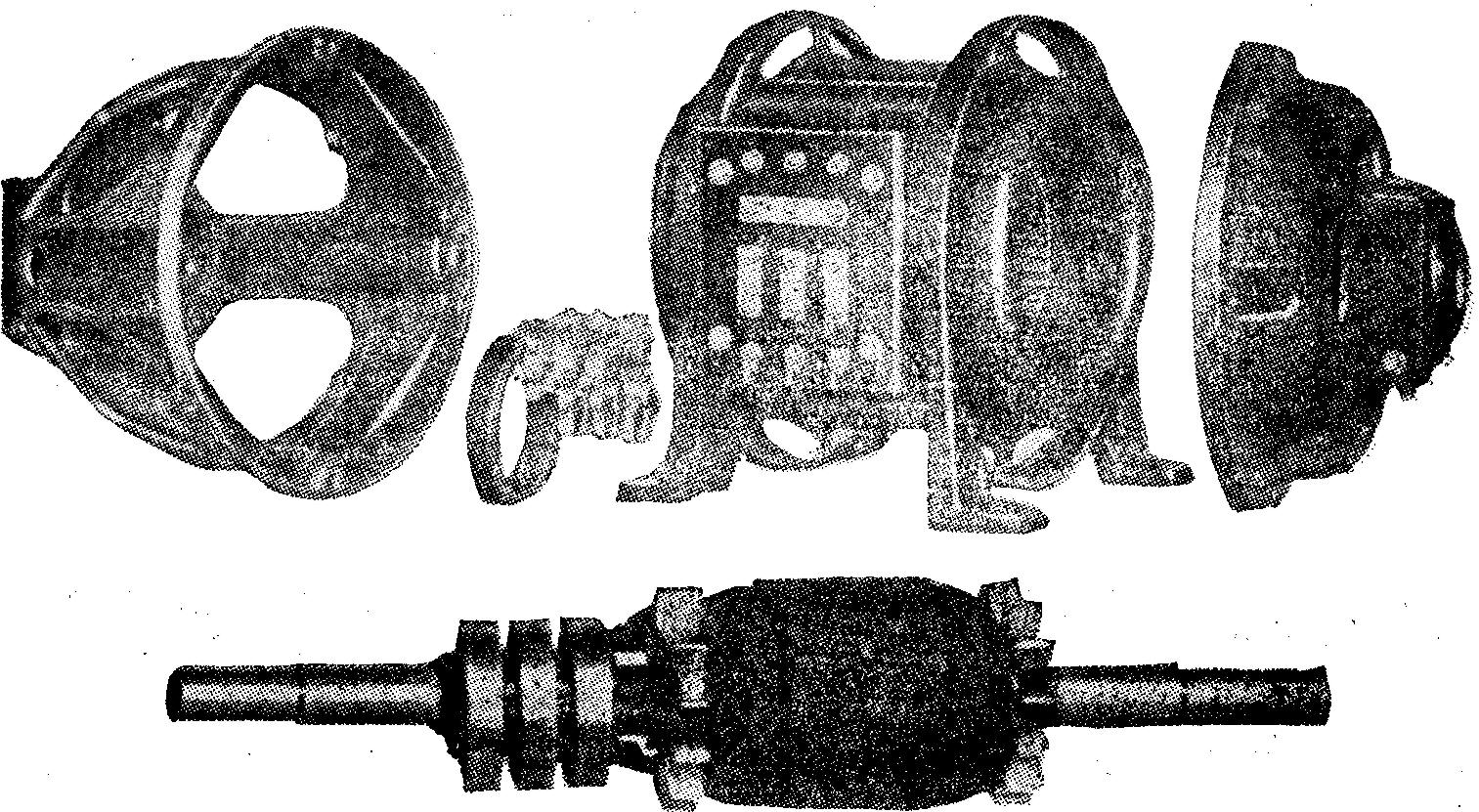
Le moteur à courant triphasé d'induction à rotor à cage d'écureuil est de construction simple. Il comprend un stator à courant triphasé et un rotor à cage qu'un nomme aussi rotor court-circuité (Fig. 49a et 49b).
Le rotor à cage d'écureuil comprend un arbre, un noyau, une cage d'écureuil et des ailettes de ventilation.
Fig. 49. — Moteur à courant triphasé à rotor à cage d'écureuil
Le noyau est formé de feuilles de tôle poinçonnées et pressées ensemble comportant un grand nombre d'encoches.
La cage d'écureuil comprend de nombreuses barres de cuivre, d'aluminium ou d'alliage métallique, logées dans les encoches du noyau ; les extrémités des barres sont boulonnées ou soudées à deux couronnes de cuivre ou d'alliage métallique.
Autrefois, on boulonnait les barres mais aujourd'hui, pour plus de sécurité, on les soude.
Dans la fabrication en grande série des moteurs dont la puissance s'échelonne jusqu'à 30 H.P., on fabrique la cage d'écureuil en une seule opération. On place le noyau dans le moule d'une machine spéciale, on y injecte de l'aluminium en fusion et tout se forme en même temps, les barres, les couronnes et les ailettes de ventilation (Fig. 50).
Fig. 50 Rotor à cage d'écureuil
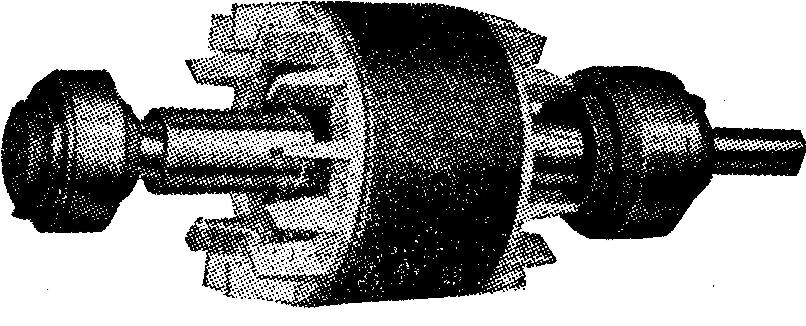
Une cage ainsi coulée tout d'une pièce peut supporter les conditions de service les plus rigoureuses.
Fonctionnement
Le moteur à courant triphasé d'induction à rotor à cage d'écureuil fonctionne grâce au champ tournant produit dans le stator.
Sous l'influence de ce champ, il s'induit dans le rotor des courants qui, en réagissant sur le champ tournant, développent un couple de rotation qui entraîne le rotor dans le sens de rotation du champ tournant.
Caractéristiques
La courbe de la vitesse de ce moteur est semblable à celle d'un moteur shunt à courant continu, c'est-à-dire que sa vitesse est à peu près constante (Fig. 51).
Fig. 51. — Caractéristiques d'un moteur à courant triphasé à cage d'écureuil
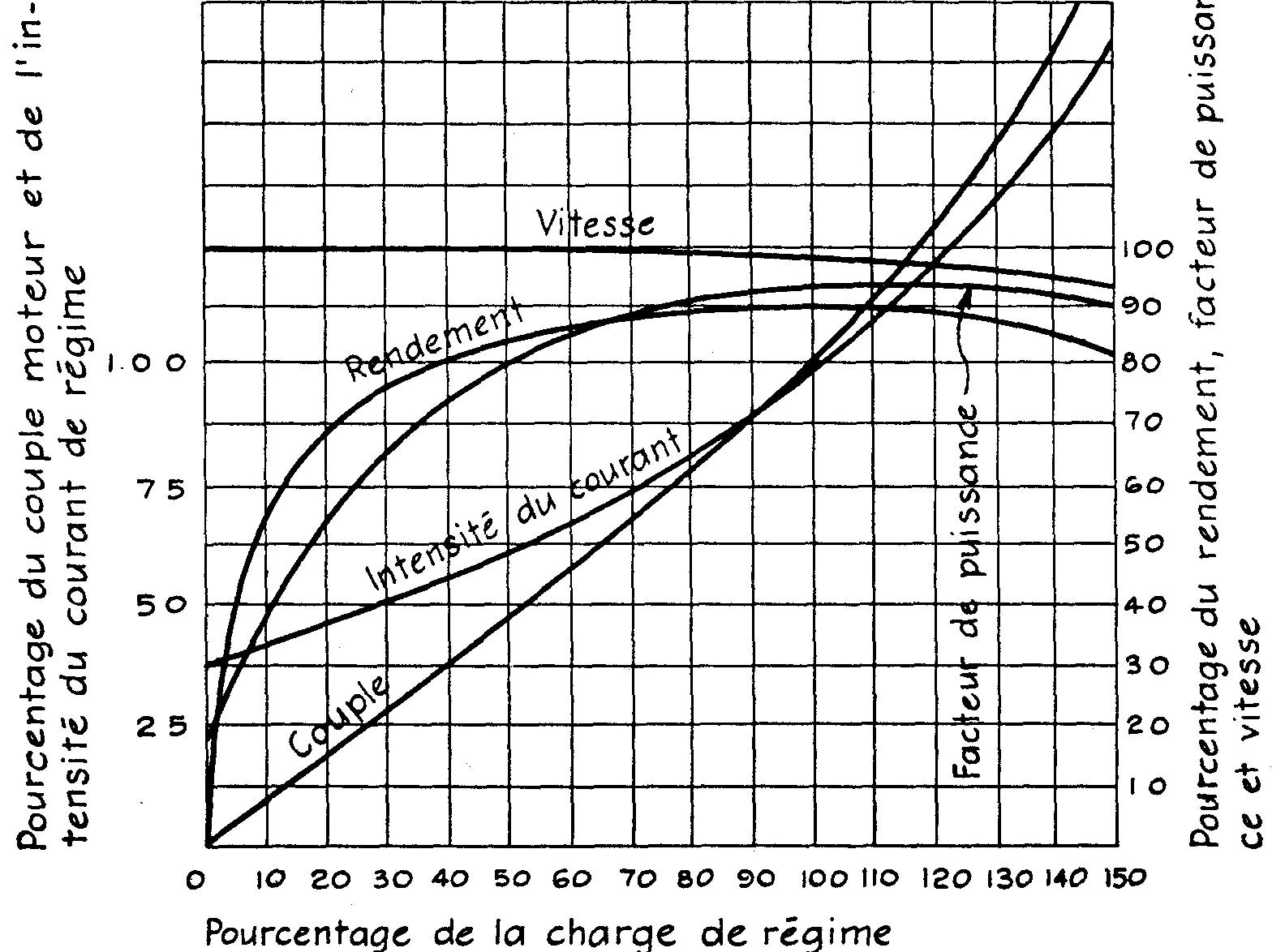
À vide, elle approche la vitesse synchrone mais elle baisse ensuite légèrement à mesure que la charge augmente.
Ainsi, la vitesse synchrone du champ tournant d'un moteur d'induction tétrapolaire, sous une fréquence de 60 cycles, est de 1800 r.p.m. La vitesse de ce moteur à vide est d'environ 1790 r.p.m. et, à charge de régime, de 1750 r.p.m.
Au démarrage, l'intensité du courant est élevée et on a un couple d'environ 175%.
En marche, l'intensité du courant augmente avec la charge, le facteur de puissance et le rendement sont ordinairement à leur maximum à charge normale (voir classification N.E.M.A).
Avantages
Ce moteur possède une construction très simple, un service facile, une marche sûre, une longue durée, un entretien réduit au minimum et une vitesse à peu près constante. Il possède des propriétés qui conviennent à la plupart des applications.
En outre, il est le moins dispendieux de tous les autres moteurs à courant triphasé.
Désavantages
La vitesse non réglable, le couple de démarrage relativement faible et le facteur de puissance arrière diminuent avec la charge pour devenir très bas à faible charge.
Note: Le moteur d'induction est la principale cause du bas facteur de puissance d'une distribution pour force motrice.
Usages
Les applications extrêmement nombreuses de ce moteur le placent comme le moteur à courant triphasé le plus en usage.
Le moteur à cage d'écureuil normal (classe A) convient à la plupart des applications sauf qu'il absorbe une puissance élevée au démarrage avec un couple relativement faible ; il ne convient donc pas à des applications à grande inertie, à couple résistant élevé ou encore lorsque le réseau ne peut supporter la puissance élevée de démarrage à moins d'un démarrage à tension réduite.
Le dessin et la construction de la cage d'écureuil affectent considérablement le couple et l'intensité du courant au démarrage ainsi que le glissement en marche.
En modifiant la cage d'écureuil, on obtient des moteurs avec des caractéristiques particulières convenant à des applications spéciales.
Ces modifications consistent principalement à changer la forme des encoches, celle des barres ainsi que le métal de la cage ; on utilise même une double cage. Ces modifications produisent de la sorte plusieurs classes de moteurs à cage d'écureuil (Fig. 52).
Fig. 52. — Caractéristiques de différents types de moteurs à courant triphasé à cage d'écureuil
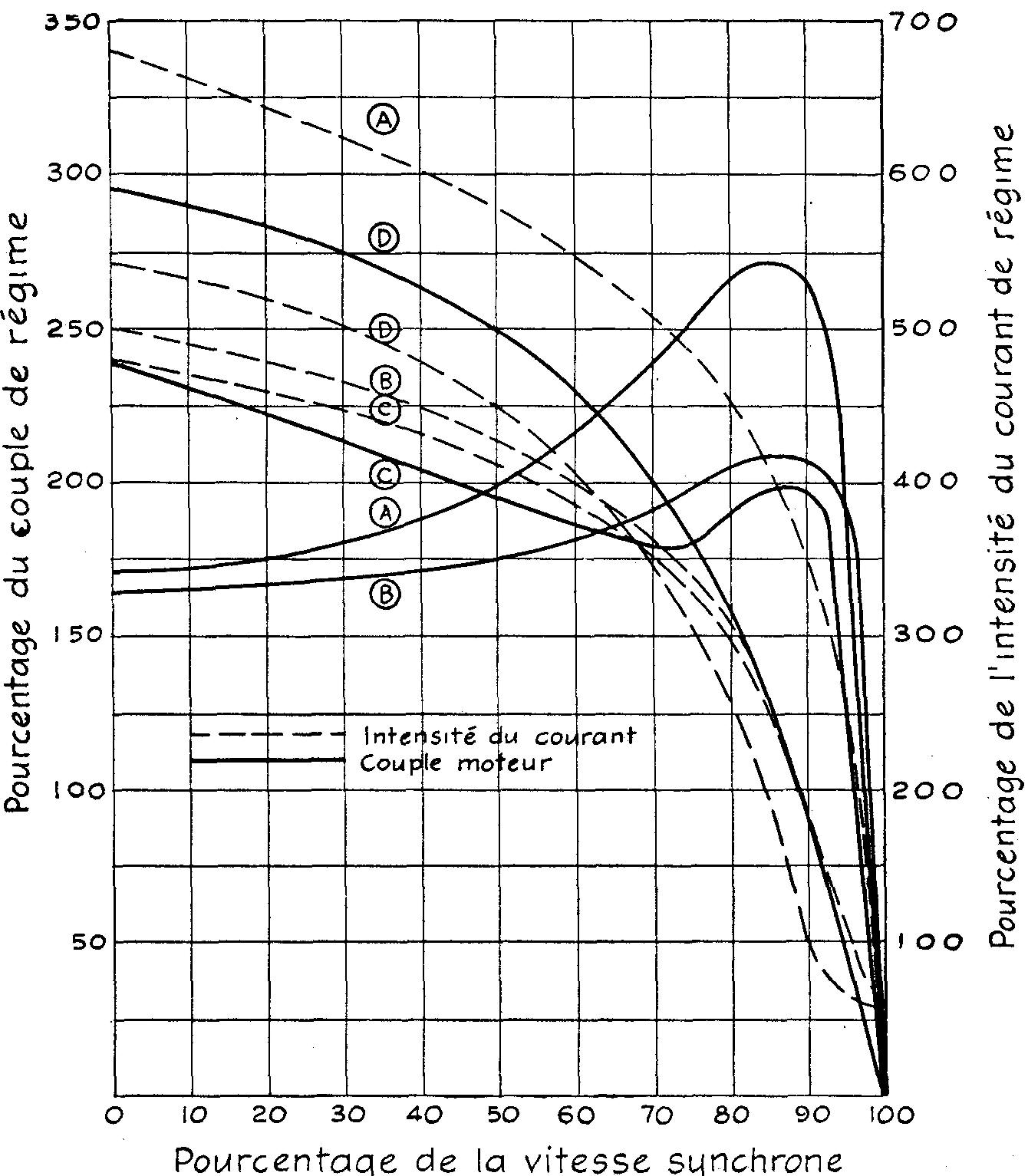
Depuis quelques années les fabricants américains suivent le standard N.E.M.A. qui classifie ces moteurs en A, B, C, D, E et F, et une de ces lettres est inscrite sur la plaque signalétique de chaque moteur.
Classification N.E.M.A. des moteurs à courant triphasé à rotor à cage d'écureuil
Classe A: Couple normal,
courant de démarrage normal
(normal torque, normal starting current)
À pleine tension, le couple au démarrage des moteurs à courant triphasé à rotor à cage d'écureuil à couple normal et à courant de démarrage normal est environ 175% du couple en marche et l'intensité du courant de 7 à 8 fois le courant de régime.
La puissance de démarrage des petits moteurs de ce genre n'affecte pas le réseau de distribution de grande puissance.
Mais, si la puissance du moteur comparée à celle du réseau est grande, l'intensité du courant de démarrage du moteur produit une chute de tension considérable qui peut amener l'arrêt de certains moteurs fonctionnant à pleine charge raccordés à ce réseau, ainsi qu'une diminution de l'éclairage à cette chute de tension peut affecter le fonctionnement d'autres appareils.
On diminue l'intensité du courant de démarrage de ce moteur en ayant recours au démarrage à tension réduite. Cette méthode, cependant, réduit considérablement le couple de démarrage car le couple est réduit suivant le carré de la réduction de la tension: ainsi, avec une tension réduite de moitié, le couple s'avère 4 fois plus faible.
Pour le démarrage à pleine tension on utilise de plus en plus les moteurs de la classe B.
Classe B: Couple normal et
faible courant de démarrage
(normal torque, low starting current for
gênerai pur pose)
Au démarrage et à tension normale le couple de ce moteur à couple normal et à faible courant de démarrage est d'environ 175% du couple de marche et l'intensité du courant de 4 à 5 fois le courant de régime.
Les encoches du rotor sont profondes.
Au démarrage, le flux magnétique du rotor pousse le courant à la partie supérieure des encoches ; il en résulte l'effet d'une haute résistance et d'une réduction du courant de démarrage.
À la vitesse de régime, le courant se distribue uniformément dans les barres.
Les moteurs des classes A et B conviennent à la plupart des applications à couple normal.
Classe C: Couple élevé et
faible courant au démarrage
(high torque, low starting current)
Le moteur à couple élevé et à faible courant au démarrage possède une double cage. Lors d'un démarrage à tension normale, le couple est de 200% à 250% du couple de marche et l'intensité du courant de 4 à 5 fois le courant de régime.
Le glissement à charge de régime n'atteint pas 5%.
Ce moteur convient aux applications nécessitant un couple de démarrage énergique comme les compresseurs, les réfrigérateurs, les pompes à pistons, les broyeuses, etc.
Classe D : À glissement élevé (high slip)
Au démarrage à tension normale, le couple d'un moteur à couple et à glissement élevé est d'environ 275% du couple de marche et l'intensité du courant de 4 à 5 fois le courant de régime.
Sa cage possède des petites barres et sa résistance est élevée ; le glissement varie de 5% à 10%.
Ce moteur convient bien à l'entraînement d'une machine à volant comme une cisaille à métal. Lorsque la cisaille coupe une pièce, la charge augmente soudainement.
Le moteur ralentit, alors, et laisse le volant absorber la surcharge. La coupe terminée, grâce à son couple énergique, le moteur accélère rapidement le volant et le rend prêt à une prochaine coupe.
On utilise ce moteur pour les presses à poinçonner, les treuils, les machines à volant, etc.
Classe E: Moteurs pour ascenseurs (elevator motors)
Le moteur pour ascenseurs est un moteur de la classe D qu'on a modifié. Son couple, grand au démarrage, diminue à mesure que la vitesse augmente et son glissement à charge de régime est d'environ 15%.
On utilise principalement ce moteur pour les ascenseurs, les treuils, les grues, etc.
Classe F: Couple faible et faible courant au démarrage (low torque, low starting current)
On améliore le rendement et le facteur de puissance d'un moteur à cage d'écureuil en réduisant son couple de démarrage.
Au démarrage, à tension normale, le couple est inférieur à 125% du couple de régime et l'intensité du courant est de 5 à 6 fois le courant de marche et le glissement en-dessous de 5%.
On utilise ce moteur pour des applications à faible couple résistant comme les souffleries, les couples moteurs générateurs, les pompes centrifuges, etc.
On utilise souvent des moteurs de la classe B au lieu des moteurs de la classe F.
Moteur à inversion rapide
Le moteur à inversion rapide (Jast reversing motor) est une moteur à cage d'écureuil de construction spéciale. Avec un rotor léger, on peut inverser son sens de rotation jusqu'à 40 fois à la minute sans interruption.
On l'applique à certaines machines à fileter, à meuler, etc.
Torque moteur. Le torque moteur est un moteur à cage d'écureuil de construction spéciale ayant un très grand couple en comparaison de celui des autres moteurs à cage d'écureuil.
On utilise ordinairement ce moteur pour un travail intermittent de courte durée comme pour les soupapes motorisées, les ouvertures de portes, certains appareils de levage, etc.
Freinage à contre-courant
Le moteur à courant triphasé à cage d'écureuil se prête admirablement au freinage électrique en inversant simplement l'ordre des phases ; ceci entraîne l'inversion du champ tournant, réduit le temps d'arrêt et permet la commande à inversion rapide.
Moteur à courant triphasé à cage d'écureuil à plusieurs tensions.
On fabrique des moteurs pouvant se raccorder à des réseaux de tensions différentes.
Les moteurs à courant triphasé à cage d'écureuil à plusieurs tensions ont plusieurs fils de sortie ou bornes permettant d'interconnecter les bobines de l'enroulement statorique pour les différentes tensions.
L'entraînement de machines mobiles nécessite de fréquents raccords à des tensions variées et, afin d'éviter des erreurs de couplage par des personnes inexpérimentées, les moteurs de ces machines sont munis de commutateurs de tension fixés directement à la carcasse.
L'opérateur a simplement à tourner le commutateur à la position correspondant à la tension disponible et à raccorder ensuite le moteur au réseau (Fig. 53).
Fig. 53.—Moteur à courant triphasé pour quatre tensions avec commutateur de tension
Moteur à courant triphasé à cage d'écureuil pour démarrage en étoile-triangle
Le démarrage en étoile-triangle nécessite un moteur à 6 bornes ou fils de sortie c'est-à-dire que les commencements et les fins des trois phases doivent être accessibles.
Lorsqu'on utilise un démarreur en étoile-triangle à sa position de démarrage, il relie l'enroulement statorique en étoile et les bobines reçoivent alors seulement 57.7% de la tension normale.
À sa position de marche, le démarreur relie l'enroulement statorique en triangle et les bobines reçoivent la pleine tension. Cette méthode réduit l'intensité du courant du moteur au démarrage.
Moteurs à courant triphasé à cage d'écureuil à plusieurs vitesses (multi-speed squirrel-cage induction-motors)
La vitesse synchrone du champ tournant d'un moteur d'induction est inversement proportionnelle au nombre de pôles de son enroulement statorique. Il est possible de changer la vitesse en changeant le nombre de pôles de cet enroulement.
On bobine ces moteurs pour deux, trois ou quatre vitesses. Les moteurs à deux vitesses ont ordinairement un seul enroulement relié à la polarité ordinaire pour la haute vitesse et relié par la méthode des pôles conséquents pour la basse vitesse.
Dans ce cas le nombre de pôles est le double et la basse vitesse est la moitié de la haute vitesse. Pour obtenir une vitesse intermédiaire on utilise deux enroulements dont un pour chaque vitesse.
En utilisant deux enroulements et en changeant tour à tour le nombre de pôles de chaque enroulement, on obtient trois et quatre vitesses.
Les moteurs à vitesses multiples ont plusieurs bornes ou fils de sortie raccordés à un contrôleur spécial qui interconnecte les groupes de bobines d'un ou de deux enroulements afin de changer le nombre de pôles et la vitesse.
En plus, ces moteurs, d'après leur genre de connexions peuvent avoir:
a) une puissance constante {constant H.P.)
La puissance est la même à chaque vitesse et le couple varie inversement avec la vitesse.
On applique ces moteurs à certaines machines-outils comme les tours, les fraiseuses, etc.
b) un couple constant (constant torque)
Le couple demeure constant pour chaque vitesse et la puissance en H.P. varie directement avec la vitesse.
On applique ces moteurs aux presses d'imprimerie, aux transporteurs, aux chargeurs mécaniques, etc.
c) un couple variable {variable torque)
Le couple varie directement avec la vitesse et la puissance avec le carré de la vitesse.
On applique ces moteurs aux pompes centrifuges, aux éventails, aux souffleries, etc. On étudiera davantages ces moteurs à la section du bobinage.
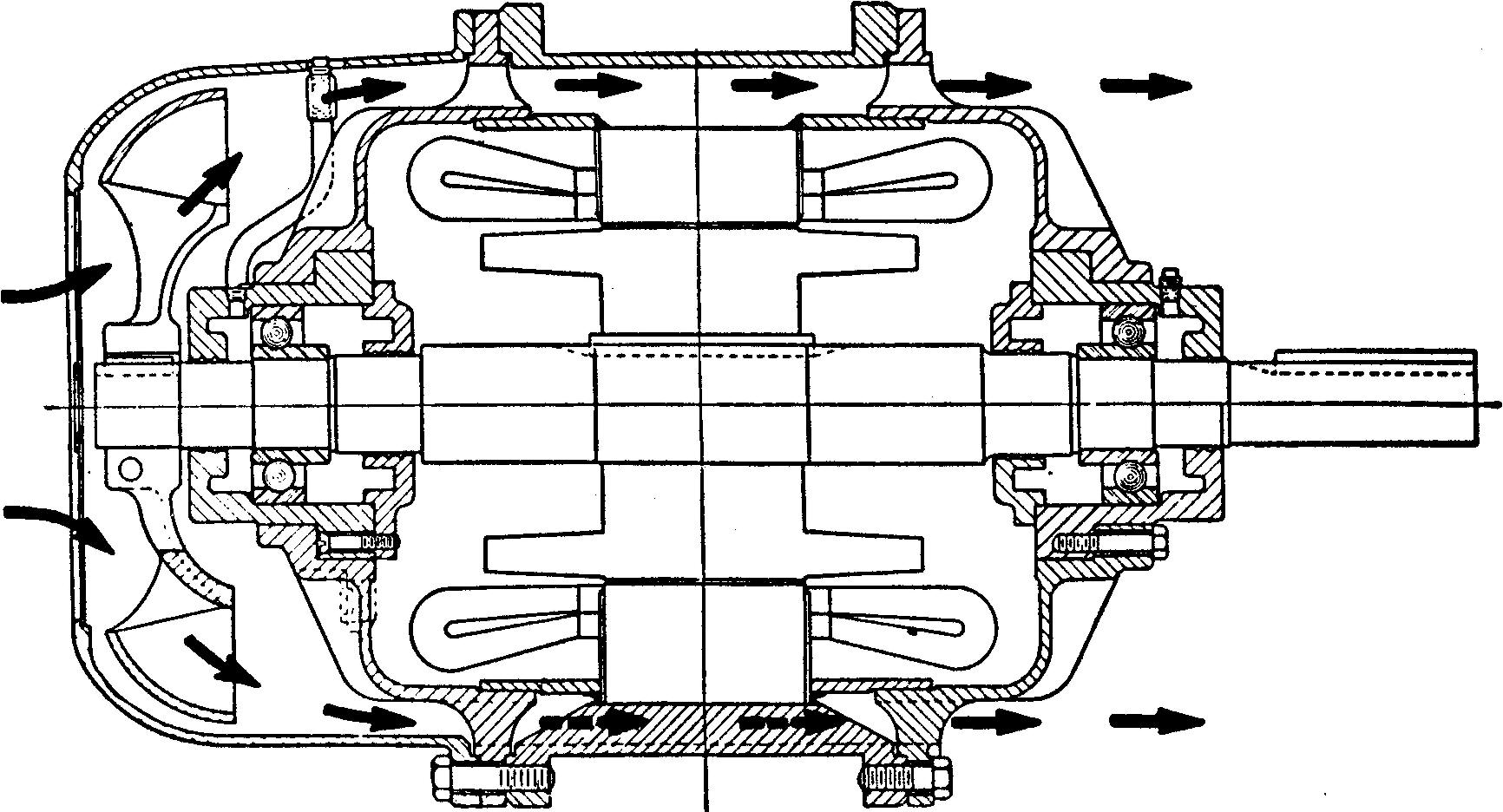
Fig. 54. — Moteur à courant triphasé à cage d'écureuil fermé avec refroidissement à éventail
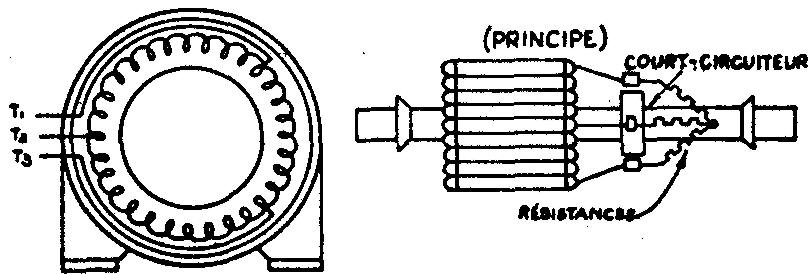
2. Moteur à courant triphasé à rotor à enroulement et à résistance interne (three-phase wound rotor with internai résistance)
Le moteur à courant triphasé à rotor à enroulement et à résistance interne comprend un stator à courant triphasé ordinaire; son rotor est bobiné et relié à trois résistances en étoile, montées à une extrémité du rotor à l'intérieur du moteur (Fig. 55).
Fig. 55. — Moteur à courant triphasé à rotor avec enroulement et à résistance interne
Ce moteur démarre comme le moteur précédent grâce au champ tournant produit par le stator.
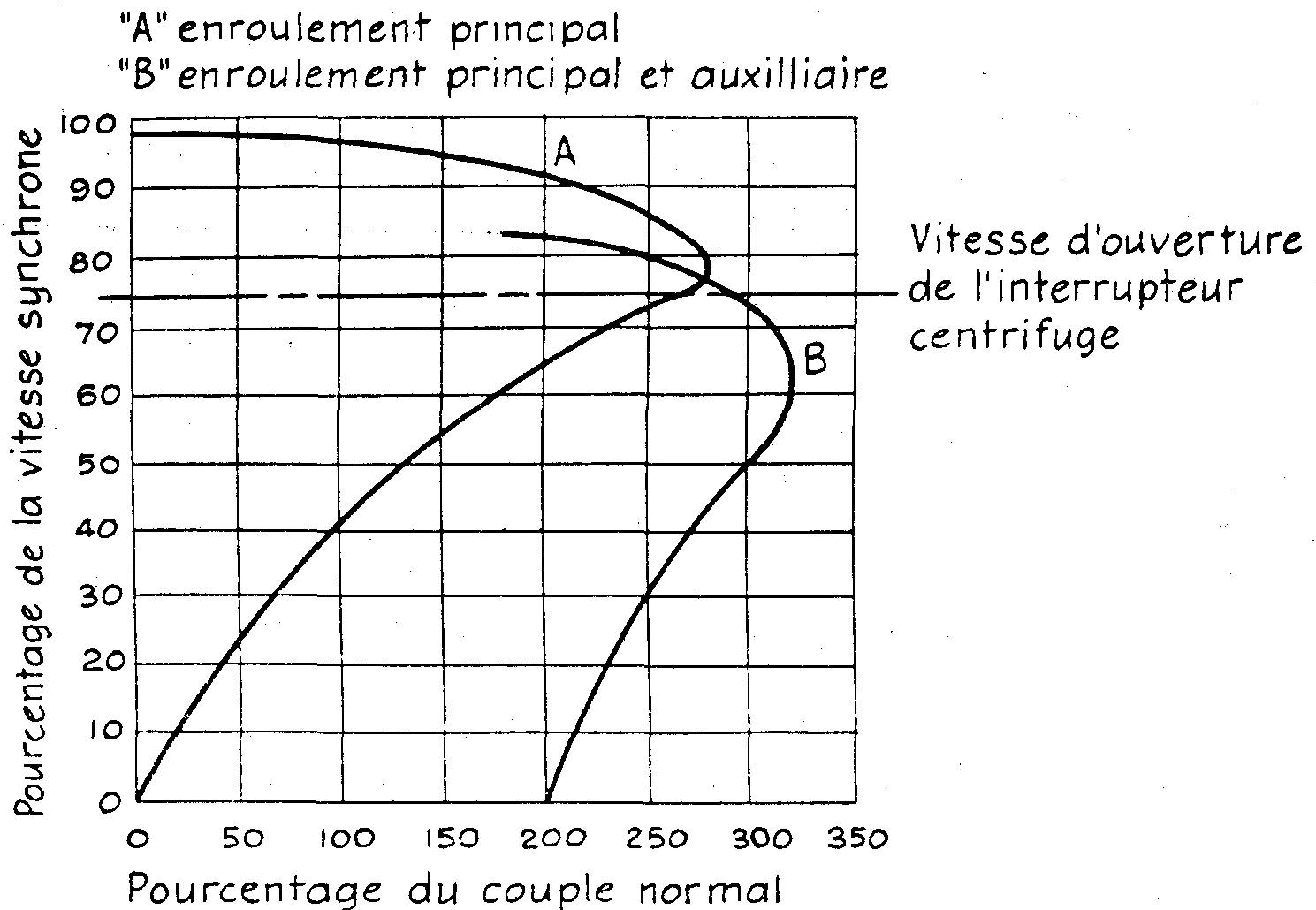
Lorsque la vitesse du rotor atteint environ 80% de sa vitesse de régime, un dispositif centrifuge court-circuite à la fois l'enroulement du rotor et les résistances. Le moteur fonctionne alors comme un moteur à rotor court-circuité.
Le couple au démarrage est 150% du couple de régime.
On peut construire le dispositif centrifuge de manière à court-circuiter les résistances par échelons et à munir le circuit rotorique de coupe-circuits.
Le principal avantage de ce moteur sur le précédent est son faible courant du démarrage. On n'utilise pas beaucoup ce moteur en Amérique du Nord.
On ne l'emploie pas pour des charges à grande inertie car il pourrait se produire un échauffement grave de ses enroulements.
3. Moteur à courant triphasé d'induction à bagues (three phase slip-ring induction-mot or)
Le moteur à courant triphasé d'induction à bagues comprend un stator à courant triphasé conventionnel ; le rotor possède un enroulement relié à l'aide de trois bagues et des balais à un rhéostat extérieur constitué de trois résistances variables en étoile (Fig. 56 et 57).
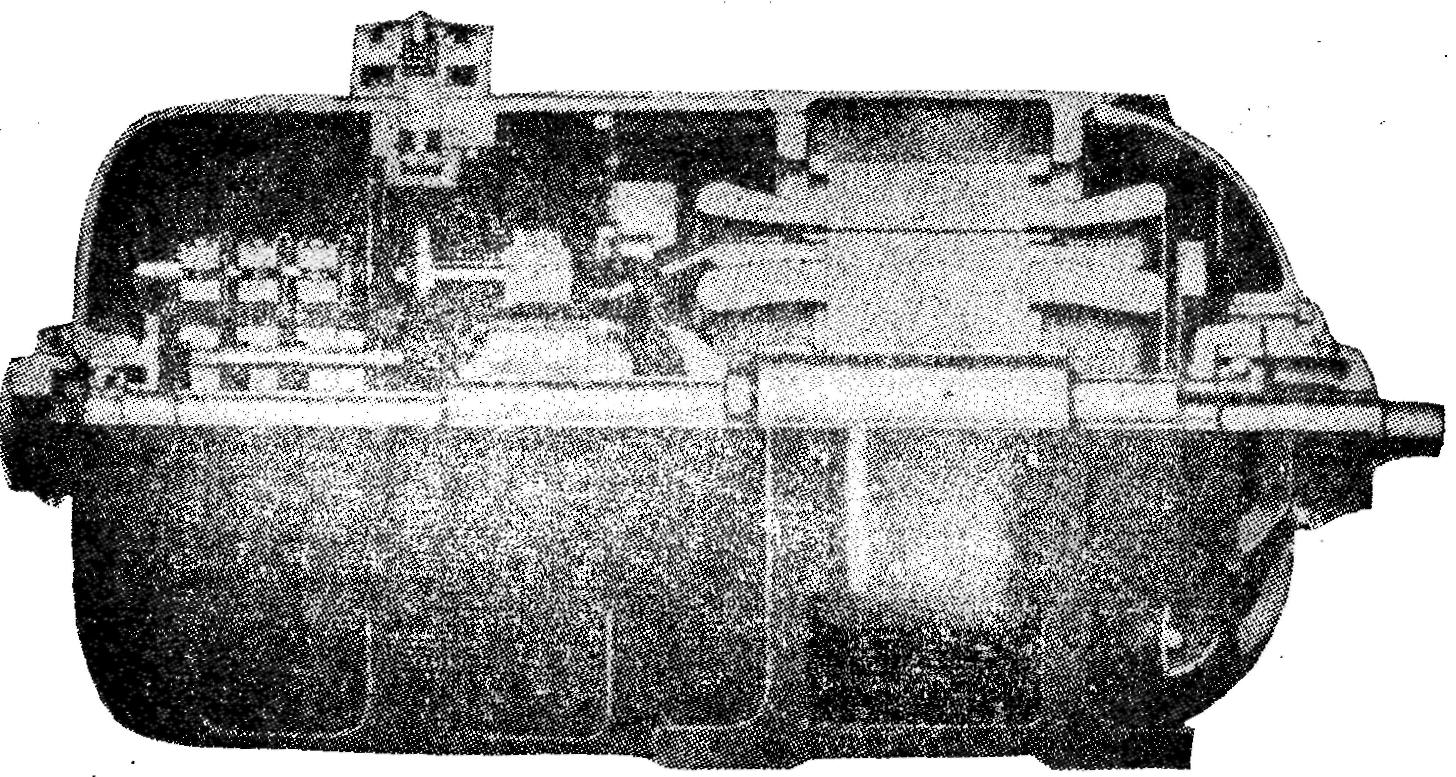
Fig. 56. — Moteur à courant triphasé d'induction à bagues
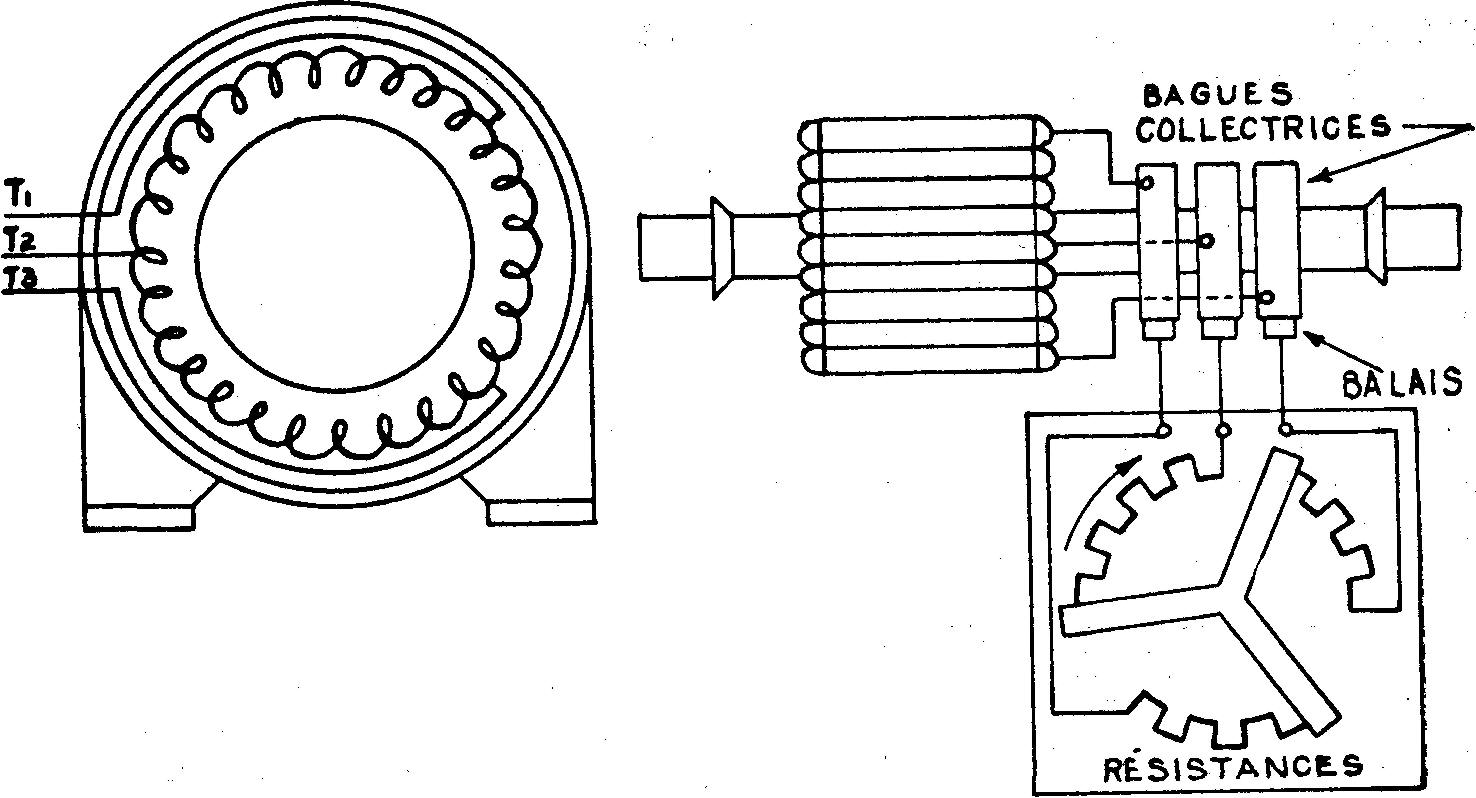
Fig. 57. — Moteur à courant triphasé d'induction à bagues pour fins éducationnelles
Au départ, toute la résistance est insérée dans le circuit rotorique et la tension maximum appliquée à l'enroulement du stator ; il en résulte un fort couple pour un faible courant au démarrage.
Lorsque le rotor atteint la vitesse maximum pour cette position du rhéostat, on réduit graduellement la résistance et la vitesse augmente.
Finalement, on court-circuite le rhéostat et l'enroulement rotorique ; le moteur marche alors comme un moteur à enroulement court-circuité mais sa vitesse demeure légèrement inférieure à celle d'un moteur à cage d'écureuil.
On varie la vitesse de ce moteur en variant la résistance dans le circuit rotorique.
Ce réglage imprécis engendre des pertes de puissance et, en outre, le moteur ne se comporte pas comme un moteur à courant continu ; la vitesse varie plutôt par échelons.
En augmentant la résistance du circuit rotorique, le glissement augmente pour toutes les valeurs du couple et le rendement diminue en raison de l'augmentation des pertes dans le rhéostat.
À vide, la vitesse ne varie pas beaucoup avec la résistance rotorique ; mais, dès qu'on charge le moteur, le glissement augmente beaucoup, et, pour une résistance donnée, augmente avec la charge.
Pour une charge constante, plus on augmente la résistance rotorique plus la vitesse diminue (Fig. 58).
Fig. 58. — Caractéristiques d'un moteur d'induction à courant triphasé à bagues
a) court-circuitées, b) avec différentes résistances inserrées dans le circuit rotorique
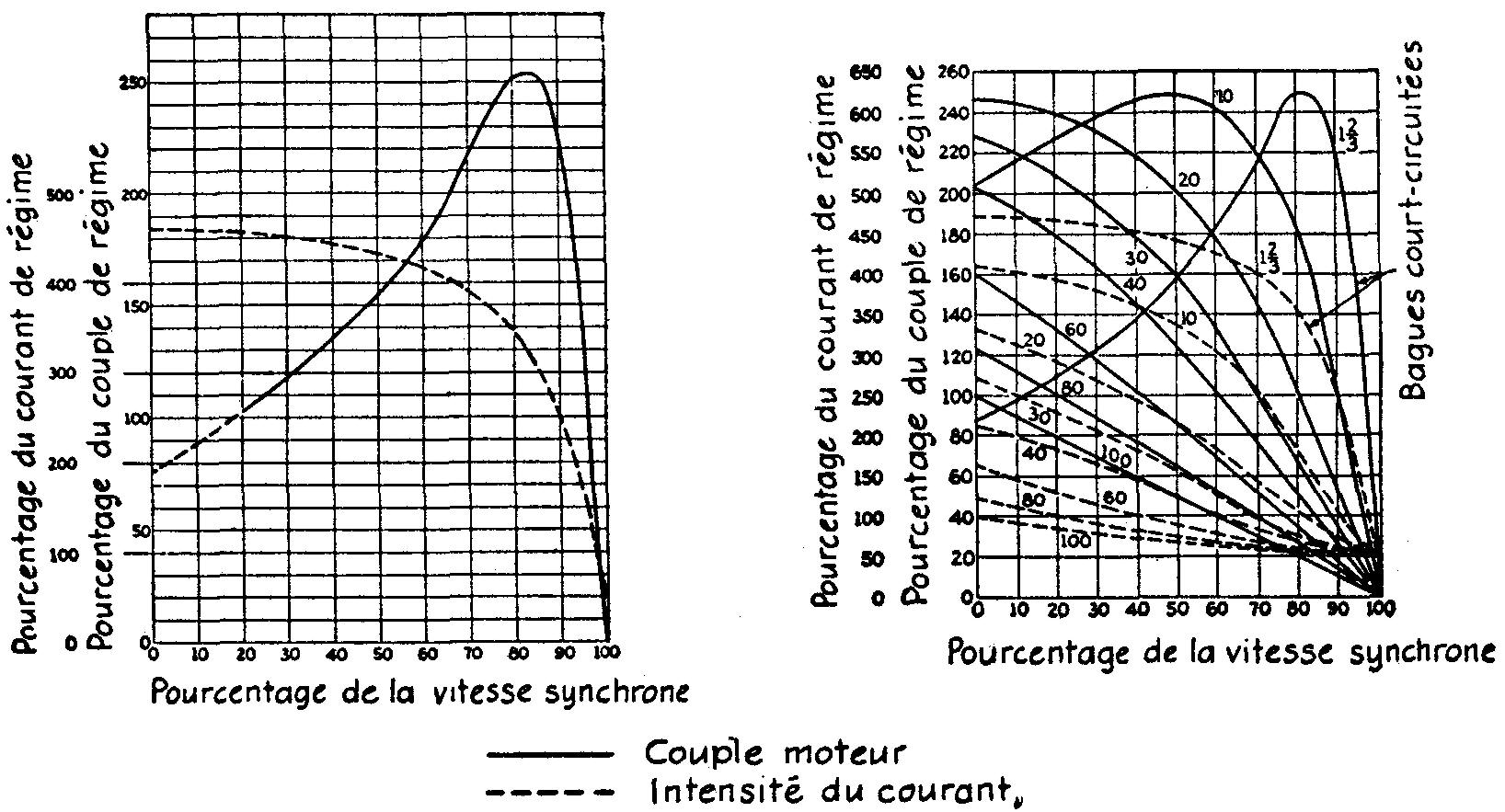
Le moteur à courant triphasé d'induction à bagues a un fort couple au démarrage, 200% à 275% du couple normal, et un faible courant, 250% à 300% du courant de régime.
Si le couple résistant de la charge est faible au départ, il réduit l'intensité du courant de démarrage.
A l'aide du rhéostat, on peut réduire la vitesse à charge de 50% à 75% de la vitesse maximum.
À vitesse réduite le facteur de puissance et le rendement sont plus bas qu'à vitesse de régime.
La tension induite dans l'enroulement du rotor, mesurée aux bagues, varie d'environ 25% à 60% de la tension du stator selon la sorte d'enroulement utilisé.
L'enroulement du rotor peut différer de celui de l'induit, mais il doit avoir le même nombre de pôles. On a souvent un enroulement en étoile avec les trois fils reliés aux bagues.
On fabrique aussi ces moteurs à deux vitesses maxima. L'enroulement a deux nombres de pôles permettant un réglage de la vitesse sur une très grande portée.
Désavantages
Le moteur à courant triphasé d'induction à bagues est plus dispendieux que le moteur à cage d'écureuil. Le rendement et le facteur de puissance à vitesse réduite de ce premier moteur lui sont inférieurs.
Avantages
Ce moteur a un fort couple pour un faible courant au démarrage, son accélération est douce, sa vitesse réglable par échelons sur une grande portée et il démarre à tension maximum.
Usages
On utilise ce moteur pour des applications nécessitant
a) un fort couple et un faible
courant au démarrage;
b) une accélération douce;
c) un réglage de vitesse
par échelons;
d) un temps de démarrage prolongé (charge ayant beaucoup
d'inertie) ;
e) des démarrages fréquents;
f) un moteur pouvant supporter
des charges variables rigoureuses appliquées par secousses.
On s'en sert surtout pour les presses d'imprimerie, les ascenseurs, les grues et les treuils électriques, les concasseurs, la traction électrique, etc.
Note. On utilise ce moteur pour des applications à vitesse constante ou à vitesse variable.
4. Moteur à courant triphasé d'induction à collecteur (com-mutator type three-phase induction-motor)
Les moteurs à courant triphasé d'induction à collecteur sont des moteurs à vitesse réglable (Fig. 59).
Fig. 59. — Moteur à courant triphasé à collecteur
De construction compliquée et variée, ils se révèlent plus dispendieux que les autres moteurs. On les utilise surtout lorsque la vitesse doit être réglée avec précision sur une grande portée.
Ces moteurs peuvent être divisés en classes à caractéristiques shunt et en série.
Moteurs à courant triphasé d'induction à collecteur à caractéristiques shunt
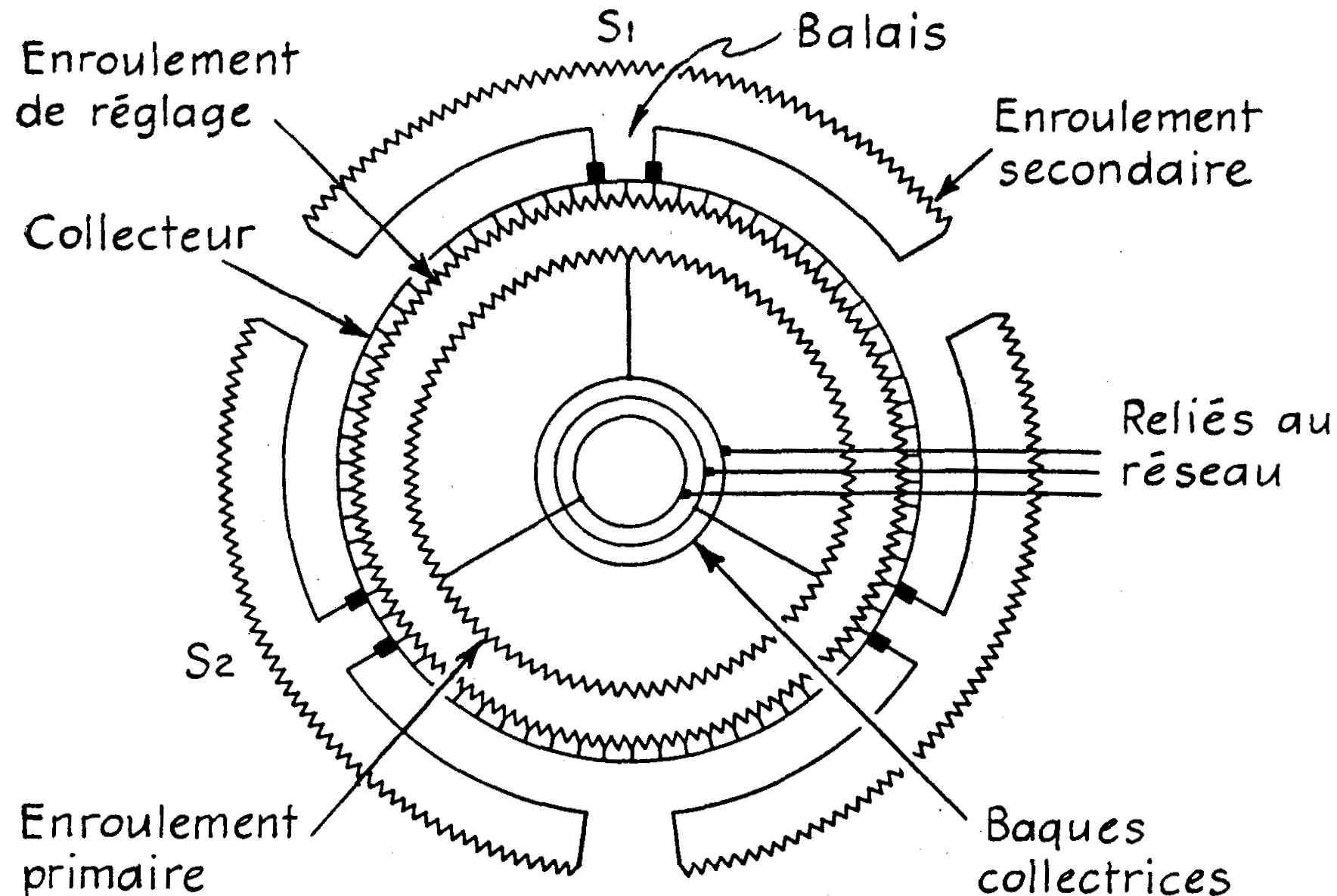
Le rotor du moteur à courant triphasé d'induction à collecteur à caractéristiques shunt comprend deux enroulements.
Le premier enroulement est relié à trois bagues collectrices avec balais et directement au réseau tandis que le second est relié à un collecteur sur, lequel frottent des balais branchés à trois enroulements distribués dans les encoches du stator (Fig. 60).
Fig. 60. — Moteur à courant triphasé à collecteur
Au démarrage, la tension maximum est appliquée aux bagues et le couple moteur (moteur réglé à basse vitesse) est de 150% à 200%. En marche, la vitesse se règle par le déplacement des balais sur le collecteur.
La portée du réglage de la vitesse est de 3 à 1. On l'augmente en insérant des résistances dans le circuit rotorique.
La vitesse maximum dépasse la vitesse synchrone de 40%. Le couple moteur demeure constant et la puissance varie avec la vitesse.
La figure 60 montre un moteur à courant triphasé à collecteur à, caractéristiques shunt amélioré et de construction récente.
On règle la vitesse en déplaçant les balais tel qu'expliqué et le réglage de vitesse peut être de 3 à 1, de 6 à 1 et de 20 à 1. On fabrique ce moteur à compter de 3 H.P.
B. Moteurs asynchrones à courant monophasé
1. Moteurs d'induction simple (straight induction motor)
Le stator du moteur d'induction simple est feuilleté et comporte un enroulement simple; son rotor est du type à cage d'écureuil (Fig. 61).
Fig. 61.—Moteur à courant monophasé d'induction simple
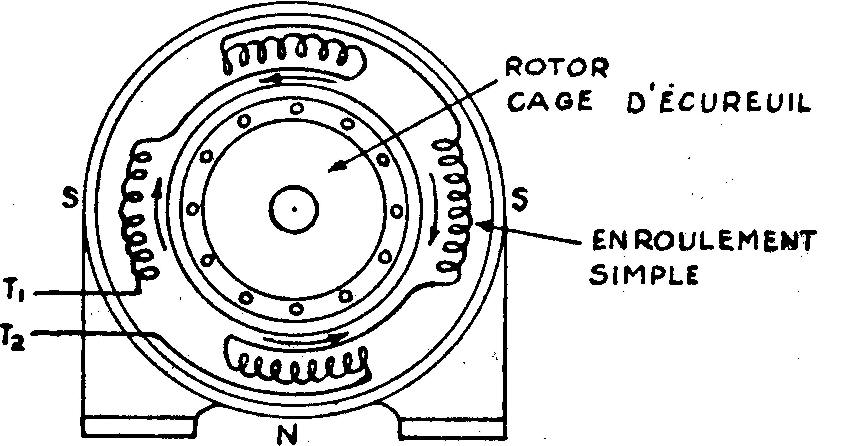
Ce moteur ne démarre pas seul, car un courant monophasé parcourant un enroulement simple ne produit pas de champ tournant.
Toutefois, si on lance le rotor manuellement ou à l'aide d'un, moteur auxiliaire et qu'on alimente ensuite le moteur, il se produit une certaine action réciproque entre le champ produit par l'enroulement du stator et le champ induit dans le rotor, et le rotor continue de tourner.
Le sens de rotation du rotor dépend du sens de rotation du lancement.
On utilise rarement ce moteur parce qu'il ne démarre pas automatiquement ; on le décrit cependant afin de comprendre le fonctionnement des moteurs à induction simple sur lesquels on a ajouté un moyen de démarrage.
2. Moteur à bobines écran (shaded-pole motor)
Le stator du moteur à bobines écran comporte un enroulement à courant monophasé simple et, à chaque pôle, on trouve une rainure où se loge une bobine court-circuitée d'une ou deux spires de cuivre nu.
Le rotor est du type à cage d'écureuil (Fig. 62).
Fig. 62. — Moteur à bobines écran
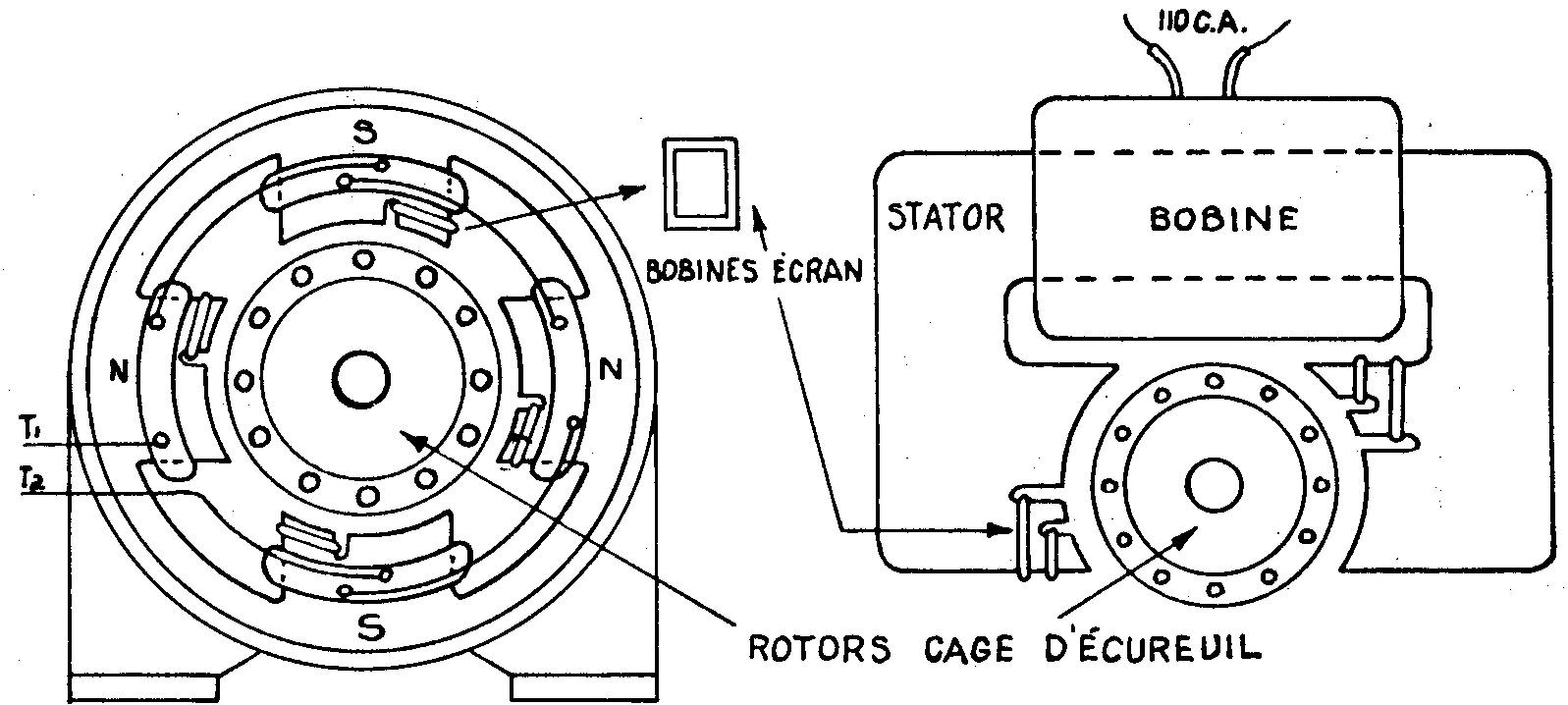
Lorsqu'on alimente l'enroulement principal du stator, l'enroulement produit un champ magnétique alternatif qui traverse le rotor et les bobines court-circuitées. Il s'induit des courants dans les bobines qui produisent un deuxième champ magnétique très faible et déphasé à l'arrière.
La combinaison du champ magnétique principal et du champ induit produit un faible champ magnétique tournant qui imite le champ magnétique tournant à courant diphasé et permet au moteur un démarrage automatique.
Le moteur à bobines écran est très faible au démarrage et donne un rendement très bas en raison de la puissance absorbée par les bobines court-circuitées continuellement dans le circuit.
Le sens de rotation dépend de la position des bobines écrans sur les noyaux polaires et le seul moyen de changer cette position et le sens de rotation est de démonter le moteur, de renverser le stator et de remonter le moteur. On fabrique cependant des moteurs à bobines écran réversibles.
Sortes
On trouve le moteur à bobines écran réversibles
a) à deux enroulements court-circuités (Fig. 63) ;
b) à deux enroulements principaux, un enroulement étant utilisé pour chaque sens de rotation (Fig. 64) ;
c) avec un enroulement fermé avec quatre fils de sortie reliés à un commutateur permettant de changer les connexions (Fig. 65).
Fig. 63.—Moteur à bobines écran inversible à deux enroulements court-circuités
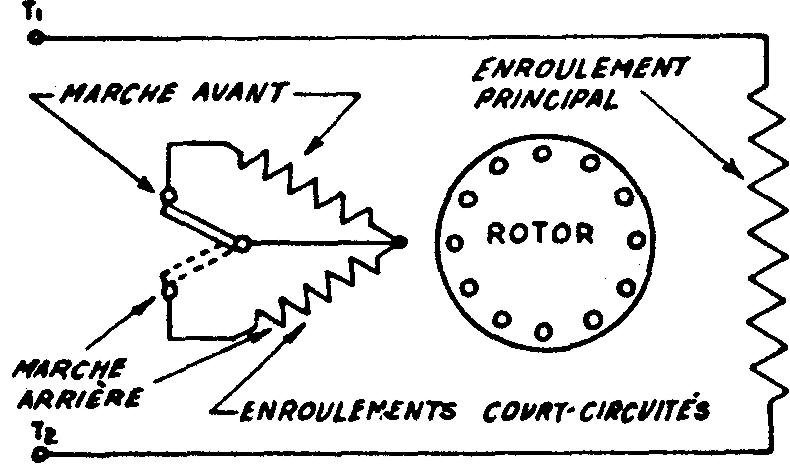
Fig. 64.—Moteur à bobines écran inversible à deux enroulements principaux
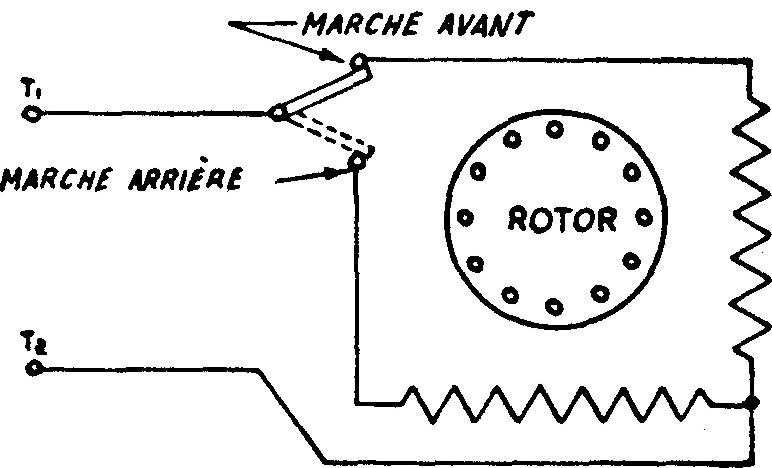
Fig. 65. — Moteur à bobines écran inversible à enroulement fermé
Vitesse. On varie la vitesse d'un moteur de ce genre en variant la tension appliquée à ses bornes à l'aide d'un rhéostat ou d'une bobine de self, variable en série avec la ligne.
Usages
Le moteur à bobines écran malgré ses inconvénients a un prix de revient très modique. On l'utilise pour plusieurs petits appareils comme les éventails, les souffleries, les petits malaxeurs, les relais, etc.
3. Moteur d'induction à reluctance (reluctance induction motor)
Le moteur d'induction à reluctance est de construction simple (Fig. 66).
Fig. 66. — Moteur à courant monophasé d'induction à reluctance

Il comporte un rotor à cage d'écureuil et un stator avec un enroulement simple. On remarque qu'à chaque pôle il y a deux entrefers ; le grand entrefer a beaucoup plus de reluctance que l'autre et retarde une partie du champ inducteur.
Il se produit un certain déphasage et il en résulte un champ magnétique tournant très faible, imitant un champ magnétique tournant diphasé. Ce moteur démarre seul mais, comme le moteur précédent, il est très faible au démarrage.
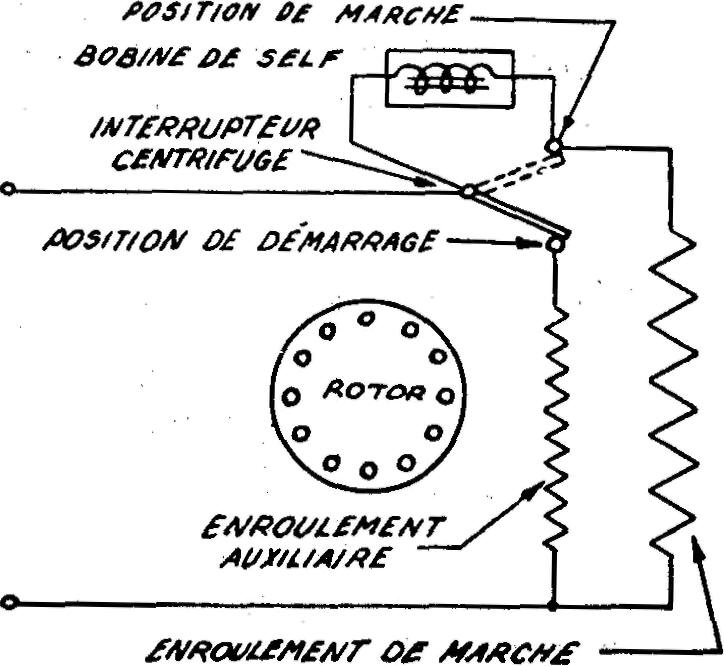
4. Moteur à phase auxiliaire (split-phase motor)
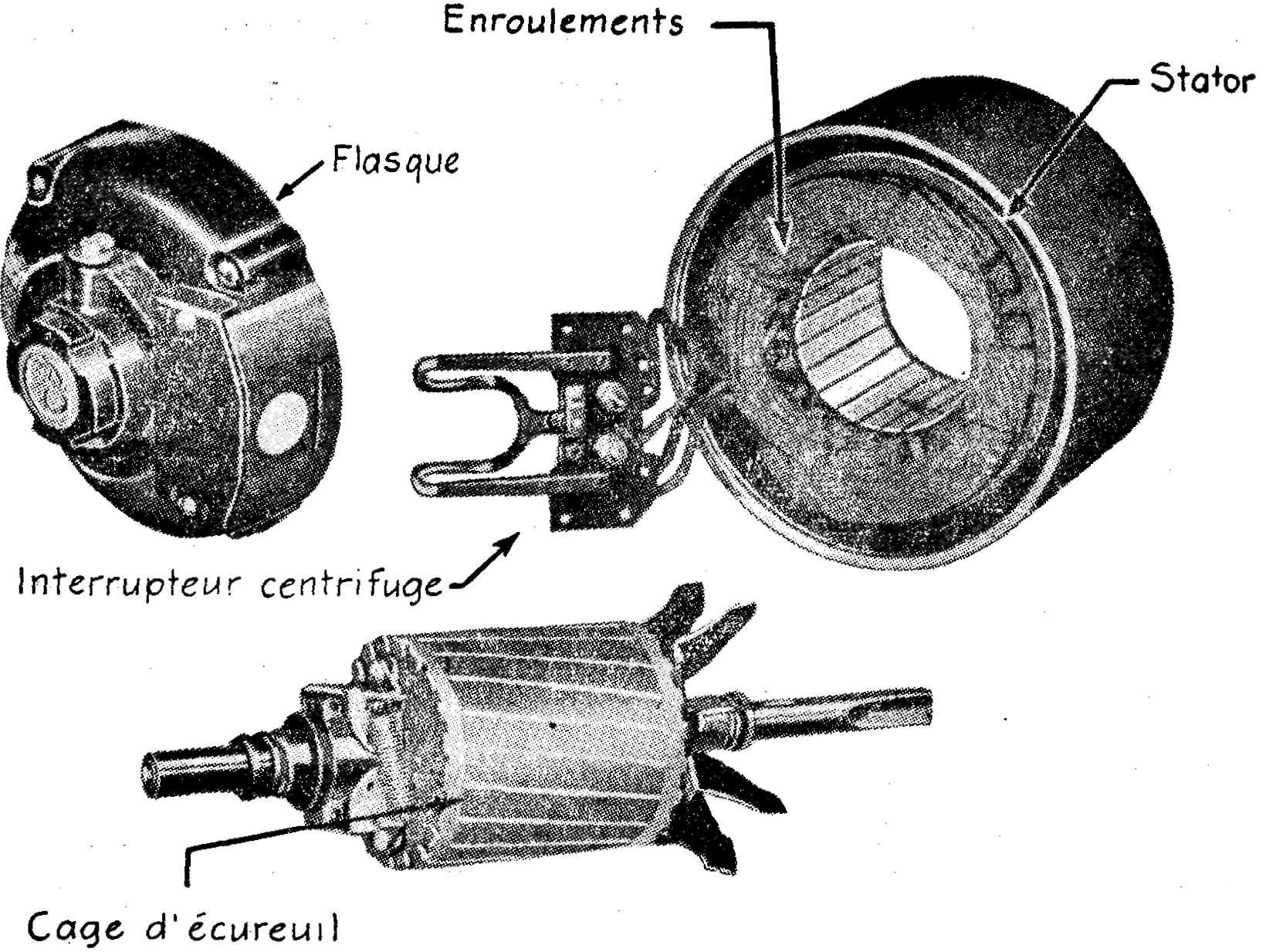
Le stator du moteur à phase auxiliaire comporte deux enroulements distincts (Fig. 67 et 68).
Fig. 67. — Moteur à phase auxiliaire
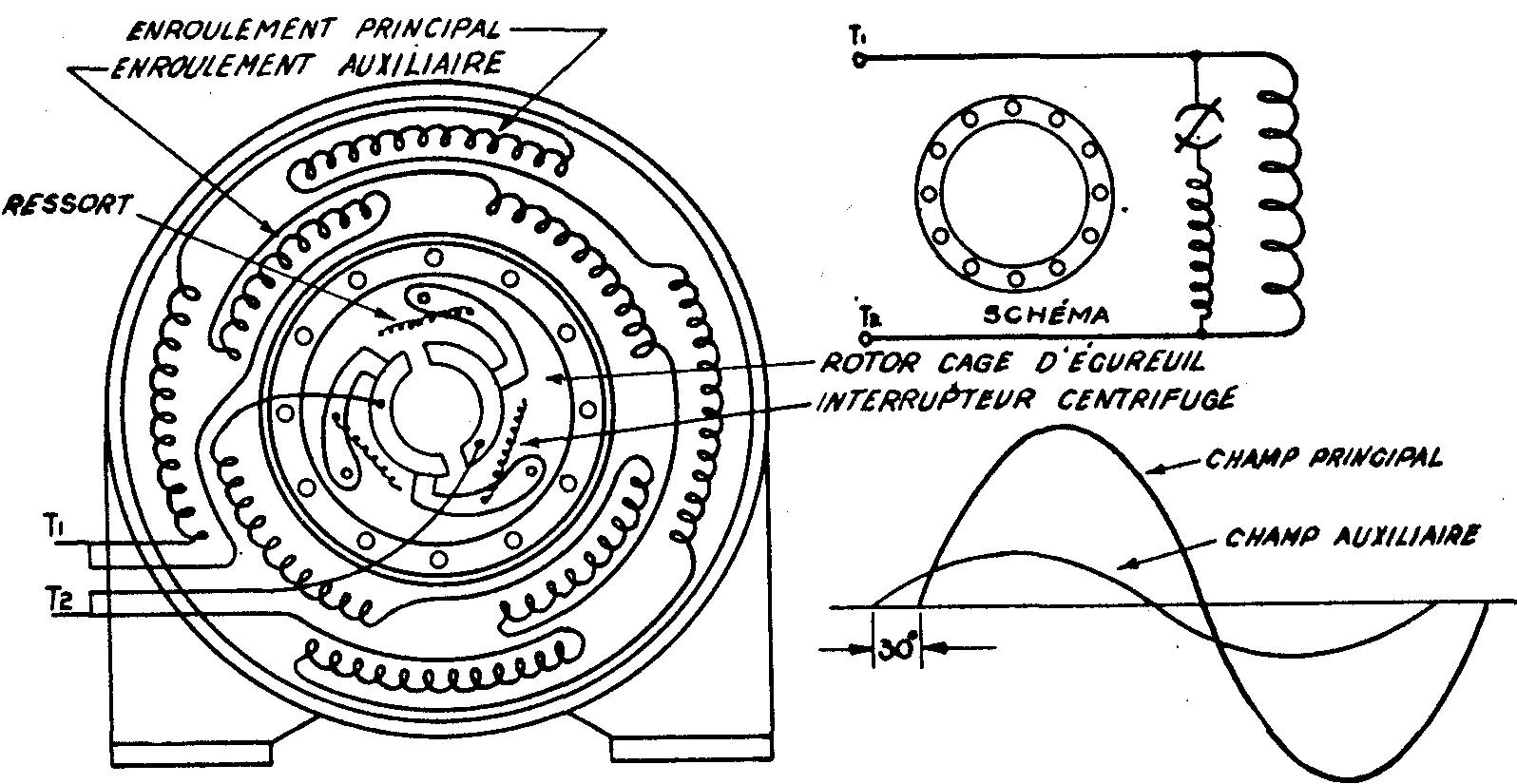
Fig. 68. — Moteur à phase auxiliaire
Comme il possède un grand nombre de spires de fils relativement gros, l'enroulement de marche de faible résistance et de grande réactance est placé au fond des encoches.
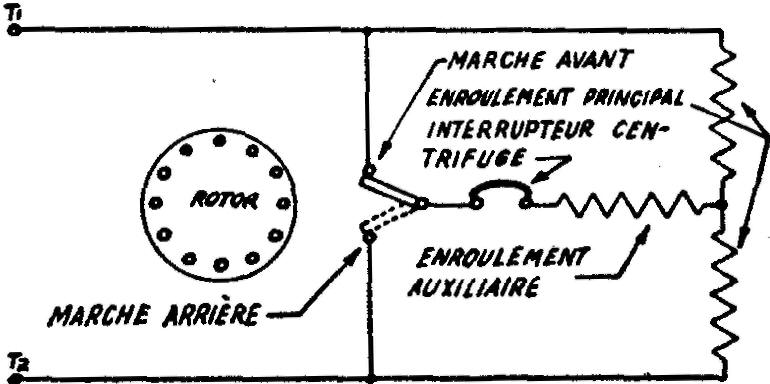
L'enroulement auxiliaire ou de démarrage ayant seulement quelques spires de fil fin est de faible réactance et de haute résistance. Cet enroulement est placé à 90° sur l'enroulement de marche. Un interrupteur centrifuge est dans le circuit de l'enroulement auxiliaire; le rotor est du type à cage d'écureuil.
Au démarrage, les deux enroulements reliés à la ligne produisent deux champs magnétiques déphasés l'un de l'autre de 25° à 30°.
Ces deux champs produisent un champ tournant semblable au champ magnétique tournant produit par un courant diphasé ; mais, ici, le champ obtenu est plus faible car le déphasage au lieu d'être 90° est seulement de 25° à 30° et l'enroulement auxiliaire possède seulement quelques spires.
Grâce à ce champ tournant le moteur démarre et, lorsque le rotor atteint 75% à 80% de sa vitesse de régime, l'interrupteur centrifuge supprime l'enroulement auxiliaire et le moteur fonctionne ensuite comme un moteur d'induction simple dont il possède d'ailleurs les caractéristiques.
Interrupteurs centrifuges.
Il y a plusieurs sortes d'interrupteurs centrifuges (Fig. 69).
Fig. 69. — principes de fonctionnement des interrupteurs des interrupteurs centrifuges
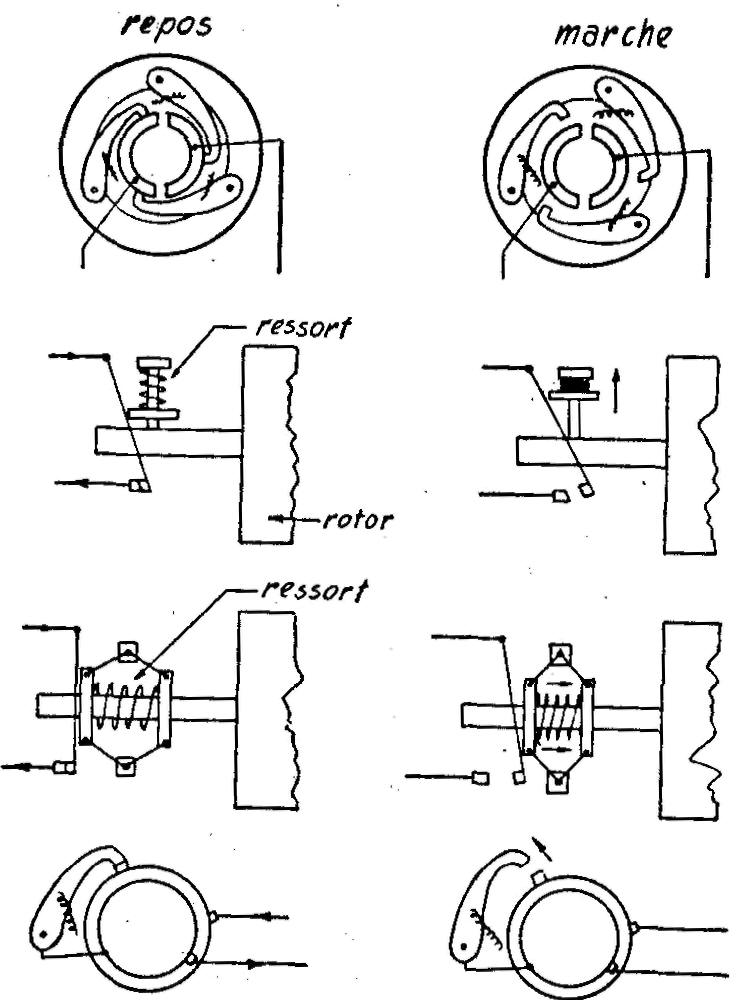
On en trouve qui ont deux bagues collectrices et des balais. Les interrupteurs centrifuges des moteurs à phase auxiliaire ordinaire sont des interrupteurs unipolaires à direction unique.
Cependant pour certains moteurs spéciaux ils peuvent être unipolaires à double direction.
Au départ, si l'interrupteur de ce moteur est ouvert, seul l'enroulement de marche est alimenté et le moteur agit comme un moteur à induction simple et ne démarre pas.
En marche, si l'interrupteur centrifuge ne s'ouvre pas, l'enroulement auxiliaire grille après quelques instants car il ne peut supporter le courant plus longtemps.
C'est la raison pour laquelle ou n'utilise pas ce moteur pour des applications à grande inertie car on a construit le moteur pour un démarrage rapide.
Le couple au démarrage est d'environ 150% du couple normal et le courant au démarrage est de 5 à 6 fois le courant normal (Fig. 70). Ces caractéristiques varient légèrement avec la puissance, la construction, etc. Pour plus de détails, il serait bon de consulter les fabricants de ces moteurs.
Fig. 70. — Caractéristiques d'un moteur à phase auxiliaire
Sens de rotation. Pour inverser le sens de rotation de ce moteur on inverse le sens du courant dans l'enroulement auxiliaire ou dans l'enroulement de marche mais non pas les deux à la fois.
Note:
Inverser les fils de ligne ne change pas le sens de rotation des moteurs à courant monophasé.
Souvent, les fils de sortie des deux enroulements sont reliés à une plaque à bornes et il devient facile d'inverser un enroulement ; certains de ces moteurs sont même munis d'une fiche pour inverser le sens de rotation.
Parfois, cependant, on ne trouve que deux fils de sortie; on enlève alors une flasque et on change les connexions à l'intérieur du moteur.
Usages
Le moteur à phase auxiliaire a un prix de revient très modique et son couple de démarrage, tout en n'étant pas très fort, convient à un grand nombre d'applications.
De tous les moteurs à courant monophasé il est le plus répandu ; on l'applique aux souffleries, aux laveuses électriques, aux petites pompes, aux petites machines-outils, etc.
La puissance de ces moteurs est ordinairement d'une fraction de H.P.
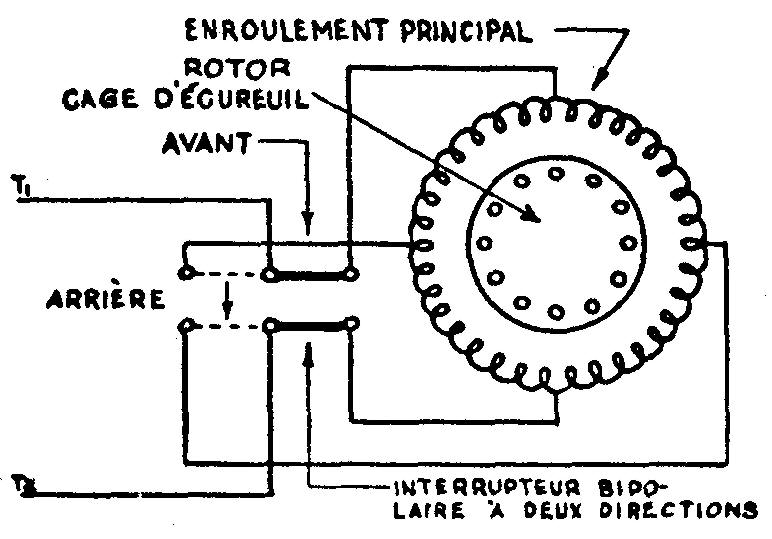
Moteur à phase auxiliaire inversible à trois fils (three-leads réversible swing connections motor)
Dans le moteur inversible à trois fils, un fil de l'enroulement auxiliaire est relié au milieu de l'enroulement de marche et l'autre fil à un interrupteur unipolaire à deux directions relié aux deux fils de ligne (Fig. 71).
Fig. 71. — Moteur à phase auxiliaire inversible
L'enroulement auxiliaire reçoit seulement la moitié de la tension normale car il est tantôt relié à une partie de l'enroulement de marche et tantôt à l'autre partie.
En changeant l'interrupteur de position, le sens du courant est inversé dans l'enroulement auxiliaire et une inversion du sens de rotation en résulte. Pour inverser le sens de rotation, on arrête d'abord le moteur.
Si on désire un arrêt rapide, on ajoute un petit frein électromagnétique qui agit sur la poulie du moteur.
On trouve des moteurs à phase auxiliaire à deux vitesses et d'autres à double tension. On les étudiera lors de l'étude du bobinage.
Moteur à phase auxiliaire avec embrayage centrifuge
Le moteur à phase auxiliaire avec embrayage centrifuge est semblable à un moteur à phase auxiliaire, sauf que son rotor doit glisser sur l'arbre et être modifié pour recevoir l'embrayage.
Fonctionnement
Au départ, le rotor libre glisse sur l'arbre mais, dès que sa vitesse atteint environ 75% de sa vitesse normale, l'embrayage agit par force centrifuge, relie le rotor à l'arbre et entraîne la charge.
L'interrupteur centrifuge de ce moteur agit à une vitesse beaucoup plus basse que les autres. Il s'ouvre à environ 40% de sa vitesse de régime. Ce genre de construction convient à des applications nécessitant un fort couple au démarrage.
Moteur à phase auxiliaire avec enroulement sur le rotor
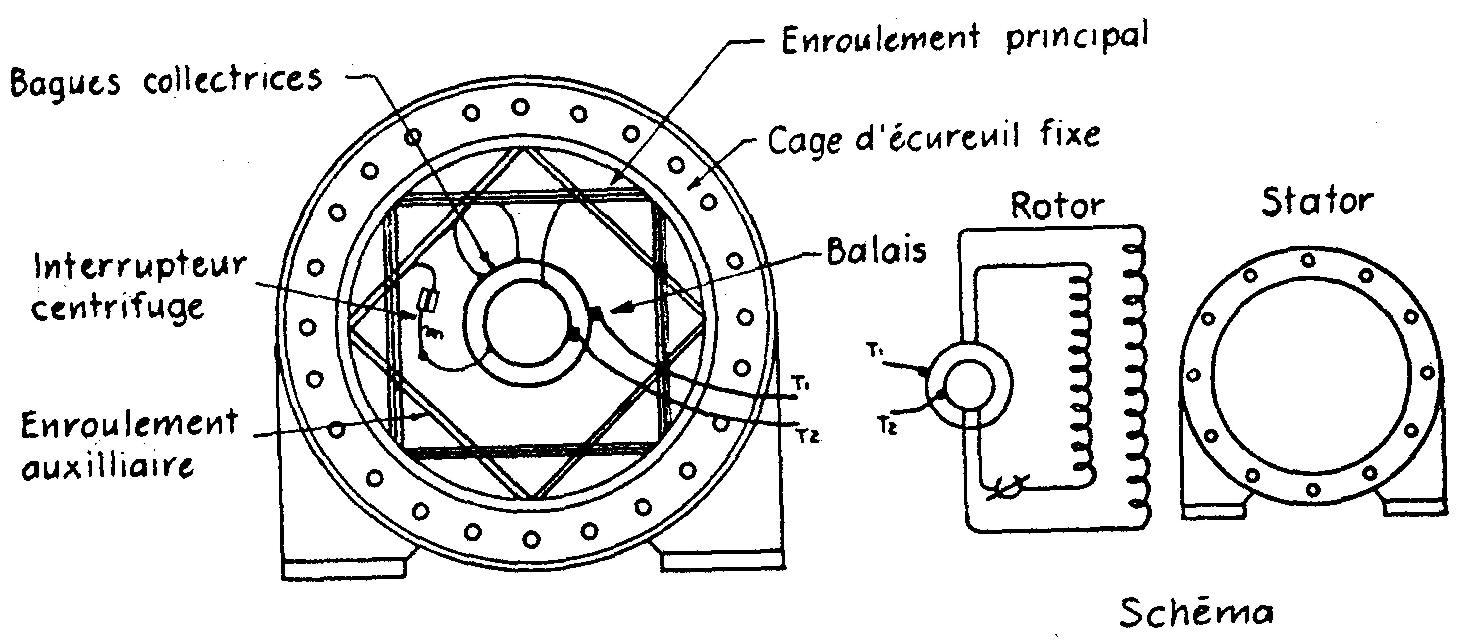
La cage d'écureuil du moteur à phase auxiliaire avec enroulement sur le rotor est fixe (Fig. 72). Deux bagues collectrices avec balais alimentent les deux enroulements placés sur le rotor ; l'interrupteur centrifuge se trouve à l'arrière des bagues.
Fig 72. Moteur à phase auxiliaire avec cage d'écureuil fixe et enroulements sur le rotor
On inverse le sens de rotation en inversant le sens du courant dans un des enroulements.
Addition en série d'un condensateur
L'addition en série d'un condensateur de capacité suffisante avec l'enroulement auxiliaire d'un moteur à phase auxiliaire augmente le couple et réduit le courant au démarrage d'une manière appréciable.
Toutefois, on est loin de réaliser les caractéristiques d'un moteur à capacité normale.
On ne peut établir une règle générale pour déterminer la capacité d'un condensateur requis, car les moteurs varient dans leur construction. On trouve facilement cette capacité par essais.
Moteur à phase auxiliaire à résistance (résistance split-phase motor)
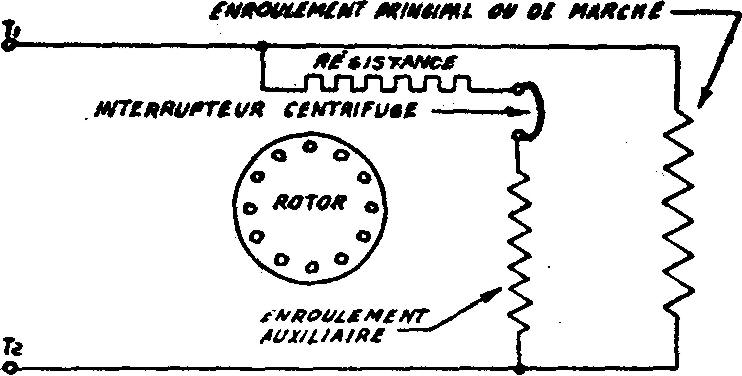
Le moteur à phase auxiliaire à résistance est un moteur à phase auxiliaire auquel on ajoute une résistance en série avec l'enroulement auxiliaire (Fig. 73) ; l'interrupteur centrifuge ouvre le circuit auxiliaire dès que la vitesse atteint environ 75% de la vitesse normale.
Fig. 73 Moteur à phase auxiliaire à résistance
Moteur à phase auxiliaire à démarrage par self (reactor-start split-phase motor).
On ajoute à un moteur à phase auxiliaire une bobine de self en série avec l'enroulement de marche pendant le démarrage (Fig. 74).
L'interrupteur centrifuge est à deux positions et lorsque la vitesse du rotor s'avère suffisante l'interrupteur ouvre le circuit auxiliaire et court-circuite la bobine de self.
Détermination du sens de rotation des moteurs à phase auxiliaire et des moteurs avec capacité.
Le rotor tourne d'un pôle de l'enroulement auxiliaire vers le pôle adjacent de même polarité de l'enroulement principal ou de marche.
Note: Certains moteurs à phase auxiliaire ou avec capacité ont un relais-série au lieu d'un interrupteur centrifuge.
Moteur avec capacité (capacitor motor)
Le moteur avec capacité est un moteur à phase auxiliaire modifié auquel on ajoute un ou deux condensateurs dans le circuit auxiliaire (Fig. 75).
Fig. 75. — Moteur avec capacité au démarrage et d'induction en marche
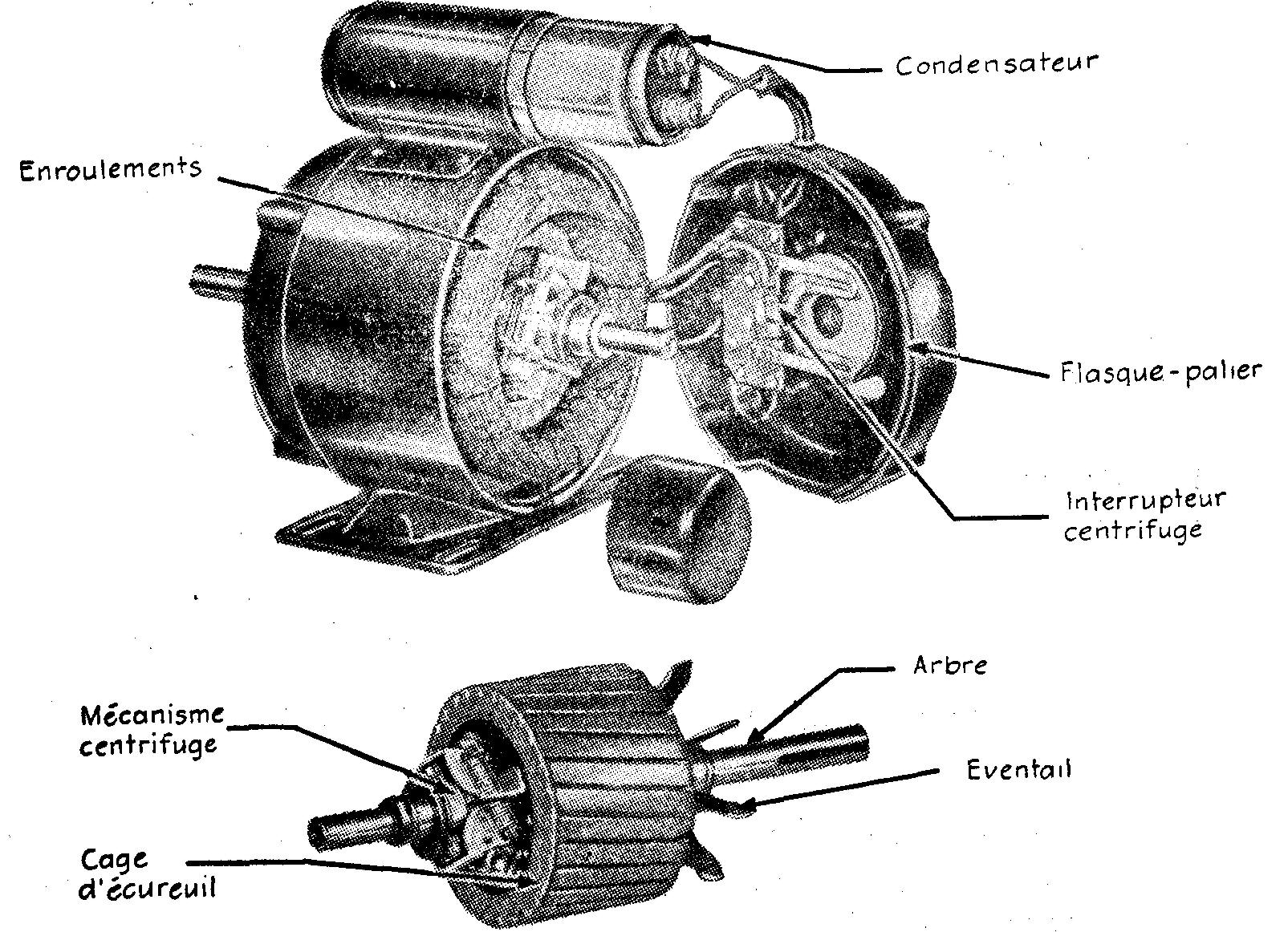
On ajoute ce ou ces condensateurs afin d'augmenter le déphasage entre les champs magnétiques produits par les deux enroulements.
L'enroulement de marche est le même que celui d'un moteur à phase auxiliaire, mais on a modifié le nombre de spires et le diamètre du fil de l'enroulement auxiliaire.
On connaît le principe du moteur avec capacité depuis soixante ans mais, faute d'un condensateur adéquat, on avait négligé ce moteur.
Depuis quelques années, grâce à la découverte et à l'amélioration du condensateur électrolytique, les moteurs à capacité ont gagné beaucoup de popularité et les moteurs avec capacité à fort couple au démarrage remplacent aujourd'hui les moteurs à répulsion dans plusieurs applications.
On distingue un moteur avec capacité des autres par le condensateur fixé à son bâti, exception faite dans le cas du condensateur de forme cylindrique placé à l'intérieur du moteur.
Pour inverser le sens de rotation des moteurs avec capacité on inverse le sens du courant dans l'un des enroulements.
Il y a plusieurs sortes de moteurs avec capacité. Ils diffèrent les uns des autres par leur construction et leurs caractéristiques.
Avant de choisir un moteur de ce genre il est sage de vérifier les diverses caractéristiques des moteurs offerts par les fabricants.
À l'heure actuelle, on peut les classifier en moteur avec capacité au démarrage et d'induction en marche, en moteur avec capacité au démarrage et en marche à valeur unique et en moteur avec capacité au démarrage et en marche à valeur double.
5. Moteur avec capacité au démarrage et d'induction en marche (capacitor start induction run motor)
Le moteur avec capacité au démarrage et d'induction en marche est un moteur à phase auxiliaire auquel on ajoute un condensateur en série avec l'enroulement auxiliaire modifié (Fig. 76).
Fig. 76. — Moteur avec capacité au démarrage et d'induction en marche
Ce moteur comprend un rotor à cage d'écureuil, un stator comportant deux enroulements distincts déplacés de 90° l'un de l'autre, un condensateur et un interrupteur centrifuge.
L'enroulement principal, identique à celui d'un moteur à phase auxiliaire, est placé au fond des encoches.
L'enroulement auxiliaire a beaucoup plus de spires que celui d'un moteur à phase auxiliaire et, parfois, leur nombre dépasse celui de l'enroulement principal.
Un condensateur d'une grande capacité est relié en série avec l'enroulement auxiliaire et l'interrupteur centrifuge.
Note: Parfois, pour obtenir la capacité nécessaire, on a deux condensateurs en parallèle, mais dans ce cas, on les considère comme un seul condensateur.
Au démarrage, les deux enroulements et le condensateur sont alimentés. Ils produisent deux champs magnétiques intenses ayant un grand déphasage et il en résulte un champ tournant semblable à un champ magnétique tournant diphasé donnant un fort couple de démarrage.
Lorsque la vitesse du rotor atteint environ 80% de sa vitesse normale, l'interrupteur centrifuge ouvre le circuit auxiliaire et il en résulte une réduction de la puissance absorbée par le moteur ; ce dernier fonctionne alors comme un moteur d'induction et il en a les caractéristiques.
Le moteur avec capacité au démarrage et d'induction en marche diffère du moteur à phase auxiliaire au démarrage seulement ; en marche, son fonctionnement est identique.
L'interrupteur centrifuge doit ouvrir positivement. En effet, s'il ouvre et ferme à plusieurs reprises, le condensateur peut recevoir une surtension qui l'endommagerait. Le démarrage doit être rapide car on a choisi l'enroulement auxiliaire et le condensateur utilisés pour un démarrage de courte durée.
On ne doit pas utiliser ce moteur là où il y a beaucoup d'inertie au démarrage. Le couple au démarrage est environ le double de celui d'un moteur à phase auxiliaire, tout en n'absorbant qu'environ 65% de son courant.
Le couple au démarrage de ce moteur varie légèrement selon sa construction, sa puissance et sa vitesse. Il varie de 275% à 450% du couple de régime.
Ainsi, le couple au démarrage d'un certain moteur de 1/4H.P. à 1725 r.p.m. est de 400% à 450% du couple de régime.
Certains fabricants construisent deux sortes de moteur de ce type: un moteur à couple de démarrage normal et un moteur à couple de démarrage élevé.
L'augmentation du couple de démarrage de ce moteur comparé à un moteur à phase auxiliaire est le résultat de l'augmentation du nombre de spires de l'enroulement auxiliaire produisant un champ plus intense et du déphasage produit par le condensateur.
Le déphasage entre les deux champs magnétiques d'un moteur à phase auxiliaire est de 25° à 30° tandis que celui d'un moteur avec capacité au démarrage d'induction en marche est de 80° et plus.
Usages
Ce moteur convient à des applications à inertie moyenne nécessitant un fort couple de démarrage et dans les cas où les surcharges en marche ne s'avèrent pas trop rigoureuses comme les compresseurs, les réfrigérateurs, les chargeurs, etc.
C'est le plus populaire des moteurs avec capacité pour applications générales.
Il peut remplacer le moteur à répulsion au démarrage et d'induction en marche ou encore le moteur à phase auxiliaire, lorsque le couple au démarrage est trop élevé pour ce dernier.
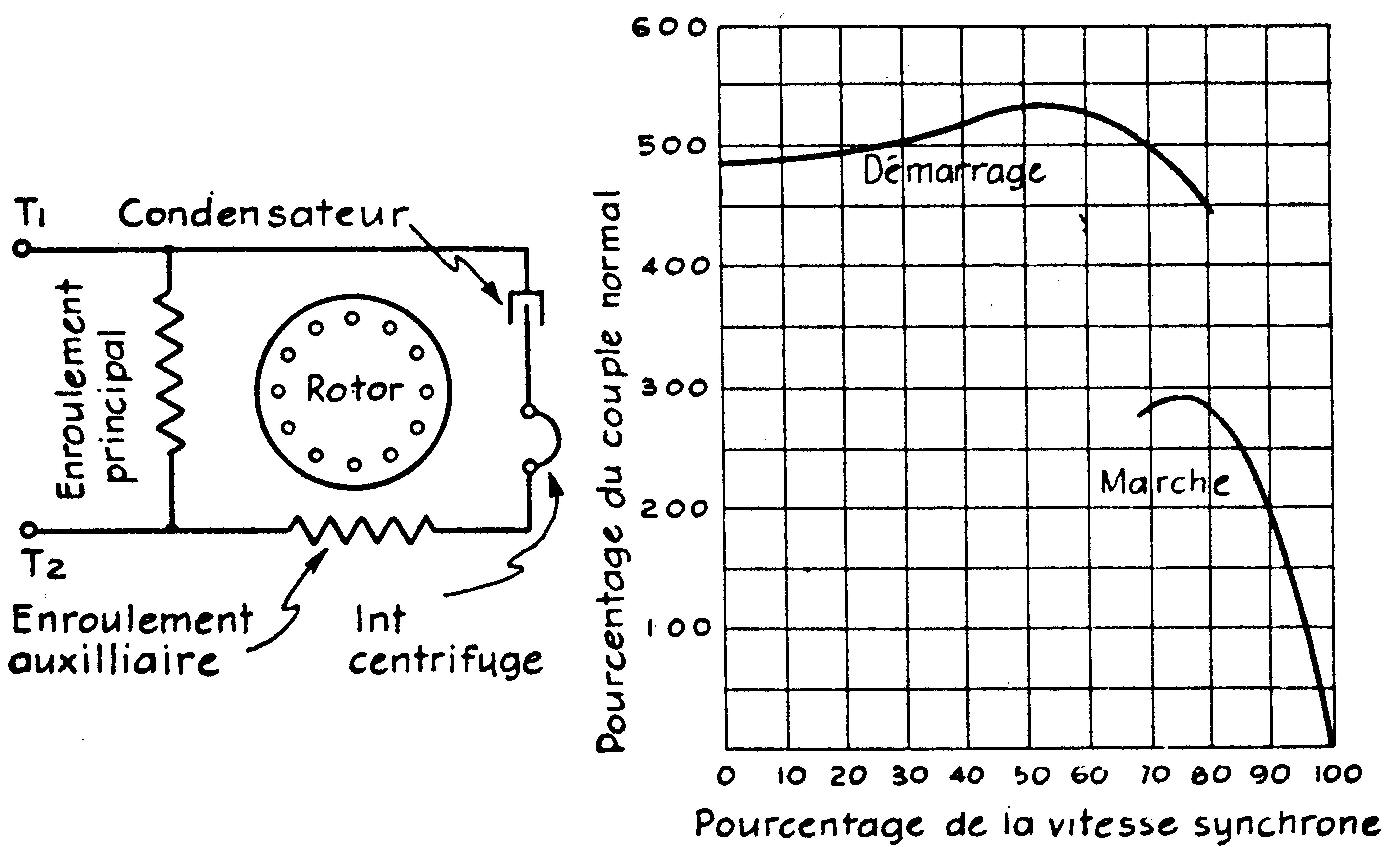
6. Moteur avec capacité au démarrage et en marche à valeur unique (capacitor start and run, single value motor)
Le moteur avec capacité au démarrage et en marche à valeur unique comprend un rotor à cage d'écureuil, un condensateur et un stator avec deux enroulements semblables ou identiques déplacés de 90° l'un de l'autre (Fig. 77 et 78).
Un condensateur à l'huile ou à la paraffine de faible capacité est installé en permanence dans le circuit auxiliaire.
Fig. 77. — Moteur avec capacité au démarrage et en marche à valeur unique
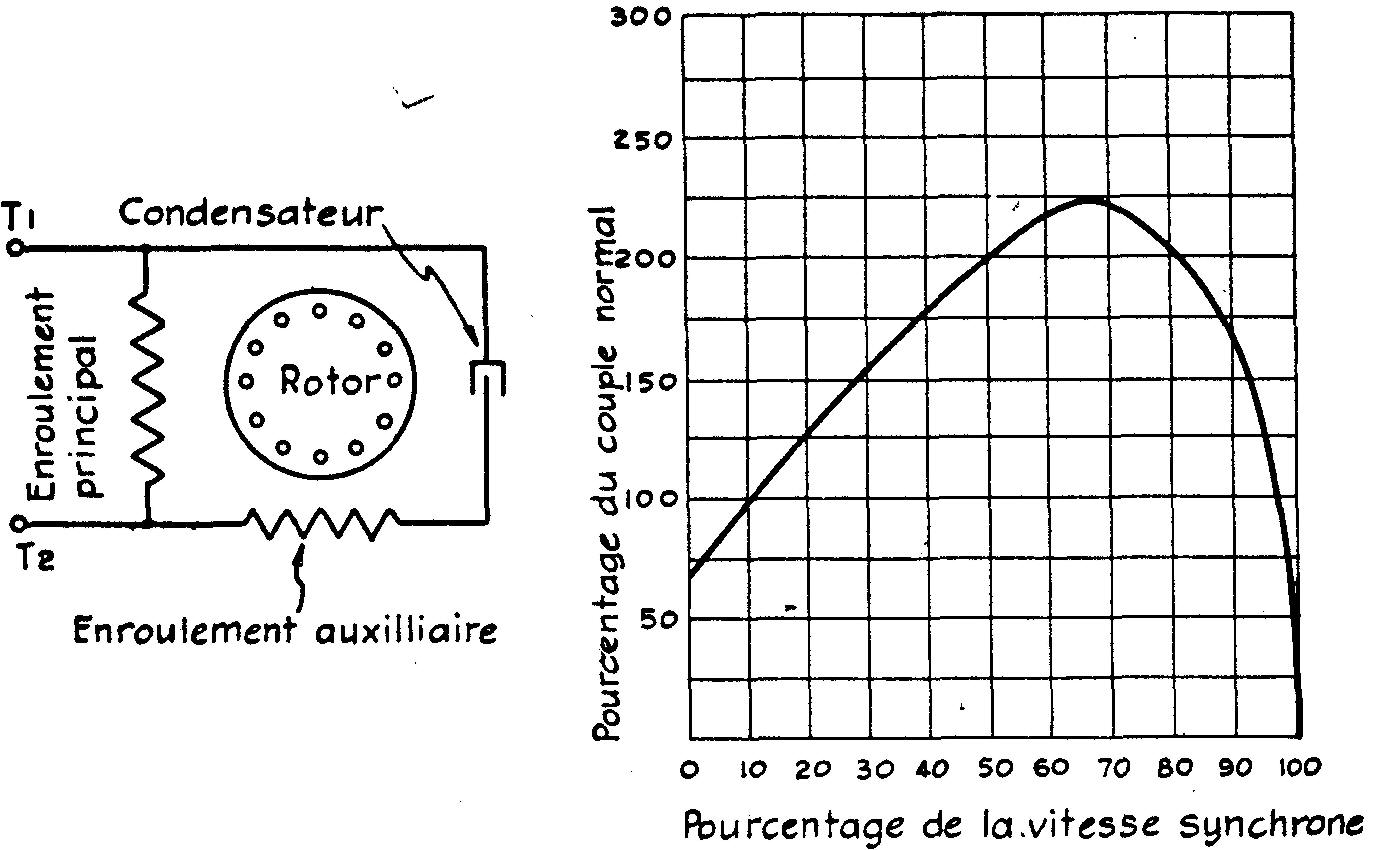
Fig. 78. — Moteur avec capacité au démarrage et en marche inversible à valeur unique
Ce moteur démarre et marche avec les deux enroulements et le condensateur. La capacité du condensateur reste toujours la même.
Le déphasage est faible entre les deux champs magnétiques produits par les deux enroulements. Il en est de même du couple de démarrage qui est environ 50% du couple de marche, c'est-à-dire beaucoup plus faible que celui d'un moteur à phase auxiliaire.
En marche, l'emploi du condensateur et de l'enroulement auxiliaire augmente le facteur de puissance, le rendement ainsi que le couple maximum et rend le moteur plus silencieux.
Usages
On utilise le moteur avec capacité au démarrage et en marche à valeur unique, à des applications à couple peu résistant comme les éventails, les souffleries, les brûleurs à l'huile, etc.
Moteur spécial avec capacité au démarrage et en marche à valeur unique à fort couple
Le moteur spécial avec capacité au démarrage et en marche valeur unique à fort couple construit pour usage intermittent de courte durée ressemble au précédent. Il en diffère principalement dans la capacité beaucoup plus élevée du condensateur afin de produire un fort couple.
Usages. On utilise ce moteur pour des applications nécessitant un fort couple de courte durée comme pour l'ouverture de soupapes, de portes, etc.
7. Moteur avec capacité au démarrage et en marche à valeur double (capacitor start and run, double value motor)
Le moteur avec capacité au démarrage et en marche à valeur double comprend un rotor à cage d'écureuil, un interrupteur centrifuge, un stator à deux enroulements comme dans le moteur précédent et deux condensateurs ou un seul condensateur avec un autotransformateur.
Au démarrage, une grande capacité est introduite en série dans le circuit auxiliaire. Le fort déphasage entre les deux champs magnétiques donne un fort couple au démarrage égal à celui d'un moteur à capacité au démarrage et d'induction en marche.
Lorsque le rotor atteint environ 80% de sa vitesse normale, l'interrupteur centrifuge agit et réduit la capacité en série avec l'enroulement auxiliaire, le moteur fonctionne alors comme un moteur avec capacité au démarrage et en marche à valeur unique et en a les mêmes propriétés.
On divise ces moteurs en:
a) Moteur à deux condensateurs
Le moteur possède deux condensateurs: un condensateur électrolytique de grande capacité utilisé au démarrage seulement et un condensateur à la paraffine ou à l'huile de faible capacité relié en permanence dans le circuit auxiliaire (Fig. 79).
Fig. 79. — Moteur avec capacité au démarrage et en marche à valeur double à deux condensateurs
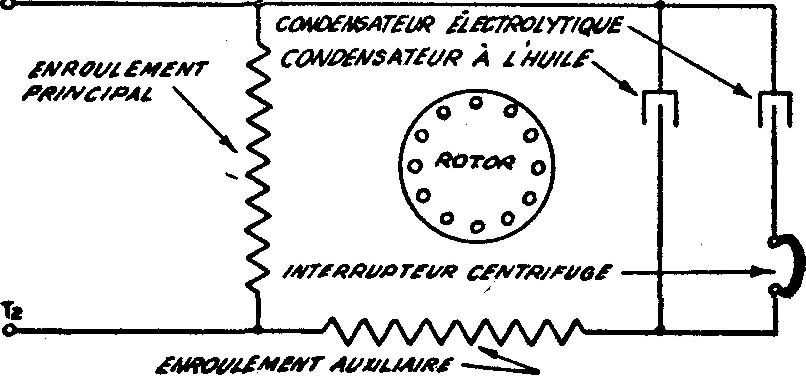
Au démarrage, les deux enroulements et les condensateurs sont alimentés et le moteur a un fort couple. Les deux condensateurs sont en parallèle entre eux et en série avec l'enroulement auxiliaire.
Lorsque la vitesse du rotor atteint environ 80% de sa vitesse de régime, l'interrupteur centrifuge unipolaire déconnecte le condensateur électrolytique de grande capacité et seul le condensateur de faible capacité reste dans le circuit auxiliaire.
Le moteur fonctionne alors comme moteur avec capacité au démarrage et en marche à valeur unique.
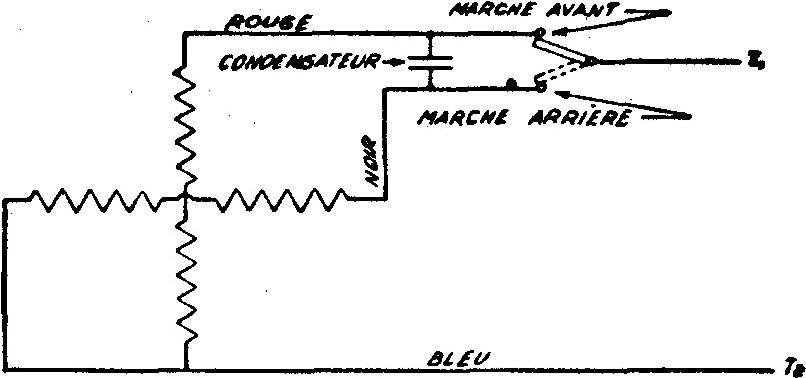
b) Moteur avec un autotransformateur et un condensateur
On fixe une boîte renfermant un autotransformateur et un condensateur au bâti du moteur (Fig. 80) .Ce moteur nécessite en outre un interrupteur centrifuge spécial unipolaire à deux directions (transfer switch).
Au démarrage l'autotransformateur permet d'appliquer une tension de 600 à 800 volts au condensateur ; il en résulte une augmentation considérable de la puissance capacitive, proportionnelle au carré de la tension appliquée au condensateur.
Ainsi, la tension étant 6 fois plus élevée, la puissance capacitive est 36 fois plus grande.
Au démarrage, le tout est relié tel qu'indiqué à la figure 80.
Fig. 80. — Moteur avec capacité au démarrage et en marche à valeur double avec transformateur
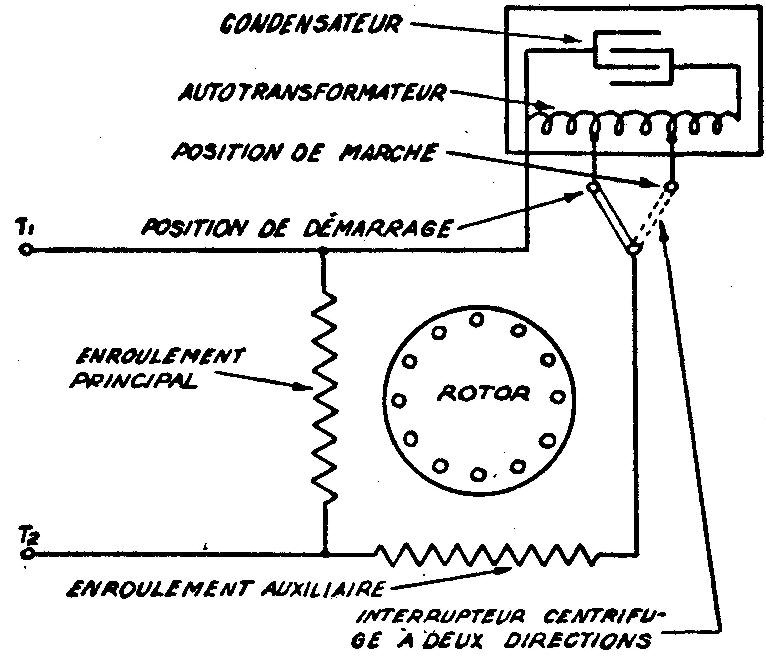
On applique une tension élevée au condensateur ; sa puissance capacitive est élevée, le déphasage entre les champs magnétiques produit par les enroulements est grand et le moteur produit un fort couple.
Dès que la vitesse du rotor atteint environ 80% de sa vitesse normale, l'interrupteur centrifuge change de position.
Il en résulte un changement des connexions de l'autotransformateur et une réduction de la tension appliquée au condensateur et de sa puissance capacitive ; le moteur fonctionne alors comme un moteur avec capacité au démarrage et en marche à valeur unique.
Les moteurs avec un autotransformateur et un condensateur possèdent un fort couple de démarrage égal à celui d'un moteur avec capacité au démarrage et d'induction en marche.
En marche, l'usage du condensateur et de l'enroulement auxiliaire augmente le facteur de puissance, le rendement et le couple maximum et rend le moteur plus silencieux. Ce moteur supporte une surcharge de 25% plus élevée que celle d'un moteur avec capacité au démarrage et d'induction en marche.
Usage. Ce moteur étant le plus dispendieux des moteurs avec capacité, on ne l'utilise que pour des applications spéciales nécessitant un fort couple de démarrage et là où on trouve des surcharges rigoureuses.
8. Moteur à répulsion simple
(straight repulsion-motor)
Le moteur à répulsion simple comprend un stator avec un enroulement à courant monophasé de 2, 4, 6 ou 8 pôles, un induit comme celui d'une machine à courant continu ainsi que des balais court-circuités frottant en permanence sur le collecteur (Fig. 81).
Fig. 81. — Moteur à répulsion
Principe
La figure 82 illustre un stator bipolaire, un induit et deux balais court-circuités.
Fig. 82. — Principe du moteur à répulsion
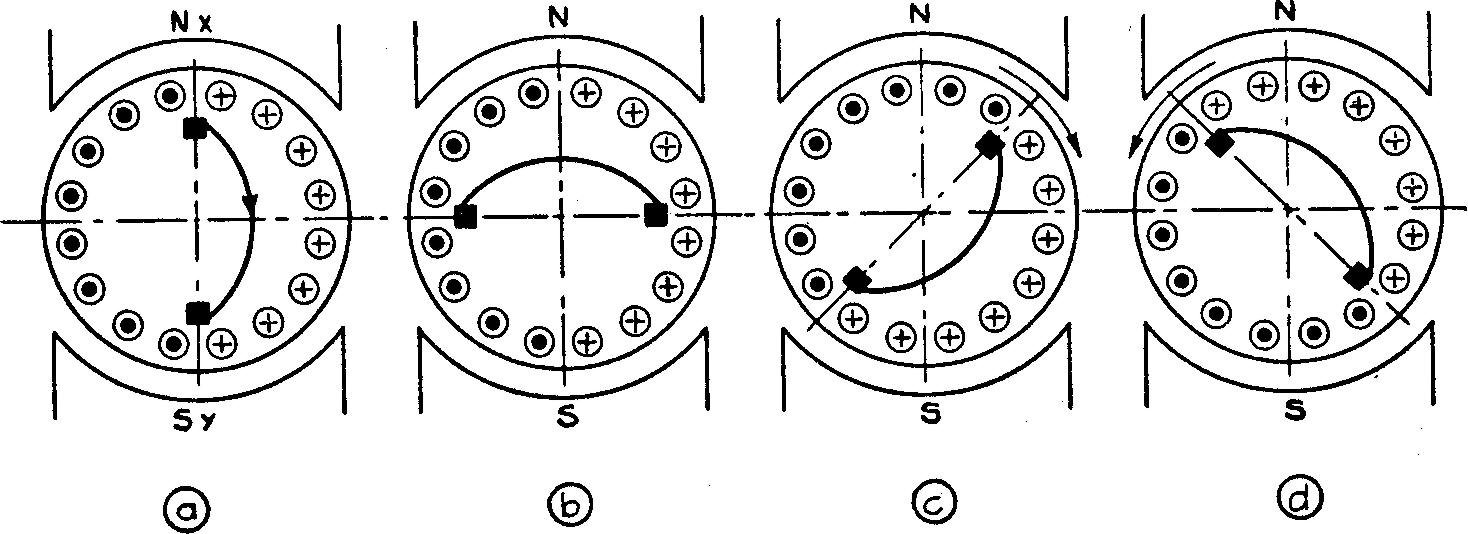
On remarque l'absence de connexion entre l'enroulement du stator et celui de l'induit.
L'enroulement du stator alimenté par un courant alternatif produit un champ-magnétique alternatif intense qui traverse l'induit ; il s'induit des tensions et des courants dans l'enroulement de l'induit comme dans le secondaire d'un transformateur.
Comme le courant alternatif change de sens continuellement, il est bon d'étudier ce qui se passe dans ce moteur à un moment donné.
Si on admet qu'à ce moment le stator a la polarité nord-sud telle qu'indiquée et si on place les balais court-circuités sur la ligne de l'axe des pôles x, y une tension s'induit dans chaque conducteur et des courants intenses circulent et produisent un nord en haut de l'induit et un sud en bas.
Mais, l'induit ne tourne pas car le couple produit par les conducteurs d'un côté de l'induit neutralise le couple produit par les conducteurs de l'autre côté et le couple résultant est nul.
En plaçant les balais court-circuités à angle droit avec le champ inducteur (Fig. 82b), les tensions induites dans les parties supérieure et inférieure de l'induit se neutralisent, il ne circule pas de courant dans l'induit et le couple est nul.
Mais en déplaçant les balais de 20° à droite de la ligne neutre (Fig. 82c), des courants induits circulent dans un sens en face du pôle nord et dans le sens opposé en face du pôle sud du stator.
Les courants induits en face du pôle nord du stator produisent un nord et les courants de sens contraire induits en face du pôle sud produisent un sud et l'axe du champ induit est incliné par rapport à celui du champ inducteur. Il y a répulsion entre ces deux champs magnétiques et il en résulte un fort couple qui fait tourner l'induit.
L'induit du moteur à la figure 82c tourne dans le sens des aiguilles d'une montre en déplaçant les balais de 20° sur le collecteur, au côté opposé de la ligne de l'axe des pôles (Fig. 82d).
On voit que la polarité du champ induit change et l'induit tourne dans le sens contraire de celui des aiguilles d'une montre.
Sens de rotation
On voit par les explications précédentes que l'on peut inverser le sens de rotation de tous les moteurs à répulsion en déplaçant uniquement les balais de l'autre côté de la ligne neutre à un endroit indiqué sur le moteur. Il suffit pour cela de dévisser les vis de serrage du plateau porte-balais et de déplacer ce dernier.
Dans le cas d'un moteur qui n'a pas de plateau porte-balais parce que les balais sont logés dans des douilles dans la flasque qu'on déplace. Le sens de rotation sera dans le sens du déplacement des balais.
Caractéristiques
Les caractéristiques du moteur à répulsion ressemblent un peu à celles d'un moteur-série (Fig. 83).
Fig. 83. — Caractéristiques des moteurs à répulsion et répulsion induction
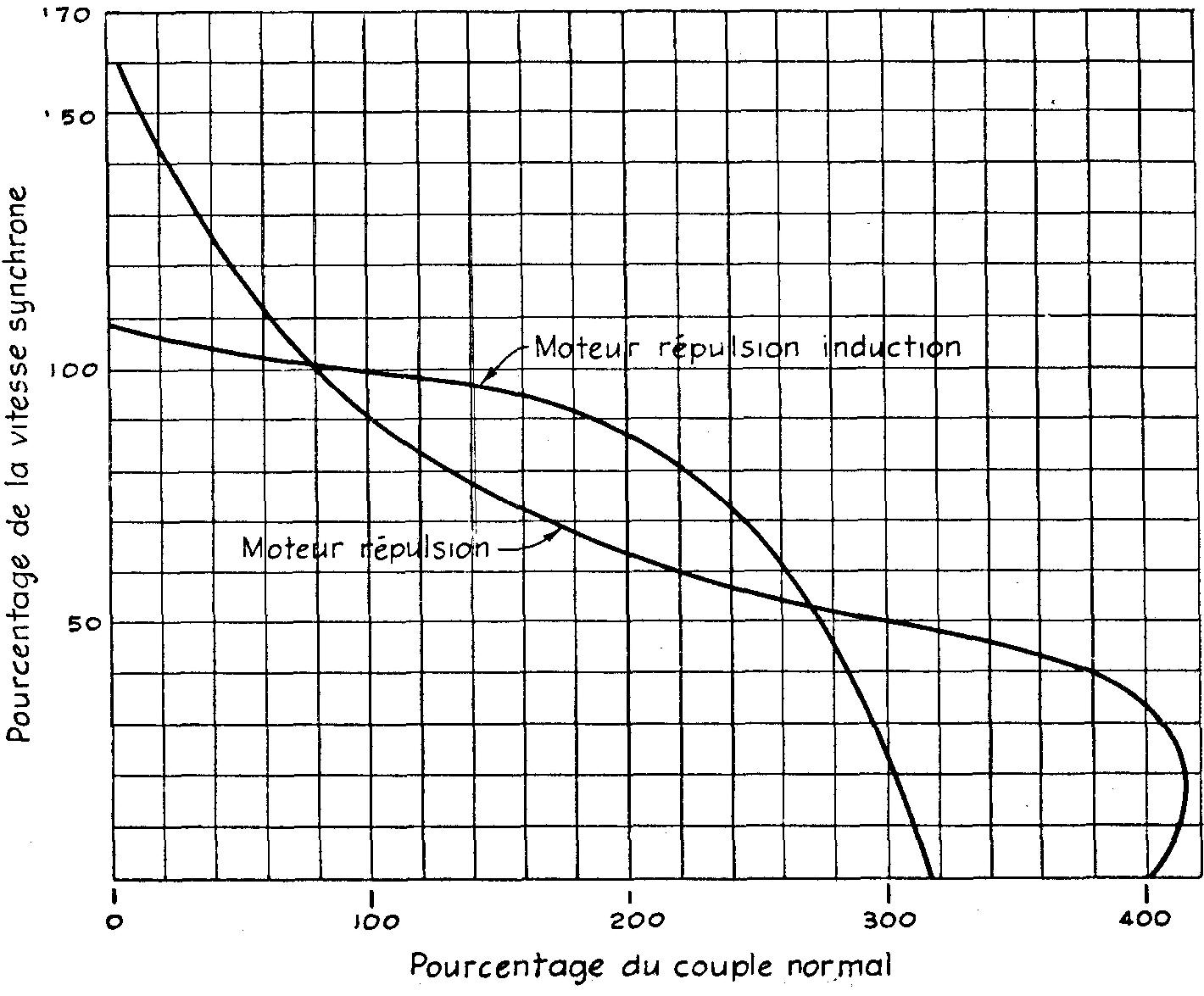
Au démarrage, son couple est fort et l'intensité de son courant est de beaucoup inférieure à celle d'un moteur d'induction.
En marche, sa vitesse varie inversement avec la charge et, à vide, elle peut dépasser de 60% la vitesse synchrone. A mesure que la charge augmente, la vitesse diminue.
Usages
On utilise surtout le moteur à répulsion simple pour des applications à couple constant.
Moteur à répulsion compensé (compensated repulsion-motor)
Le moteur à répulsion compensé est un moteur à répulsion auquel on ajoute un enroulement compensateur au stator; cet enroulement est relié à deux balais frottant sur le collecteur.
L'enroulement compensateur améliore le facteur de puissance et réduit l'étincellement. Le couple de démarrage est de 2.5 à 3 fois le couple de marche et le courant de démarrage d'environ le double du courant de marche.
Usages
Le moteur à répulsion compensé convient aux applications nécessitant un fort couple de démarrage et là où la charge est irrégulière et varie par secousses.
Moteur à répulsion à vitesse variable
On règle la vitesse d'un moteur à répulsion à vitesse variable en variant la tension appliquée au moteur ou en déplaçant les balais sur le collecteur (Fig. 84).
Fig. 84. — Moteur à répulsion à vitesse réglable
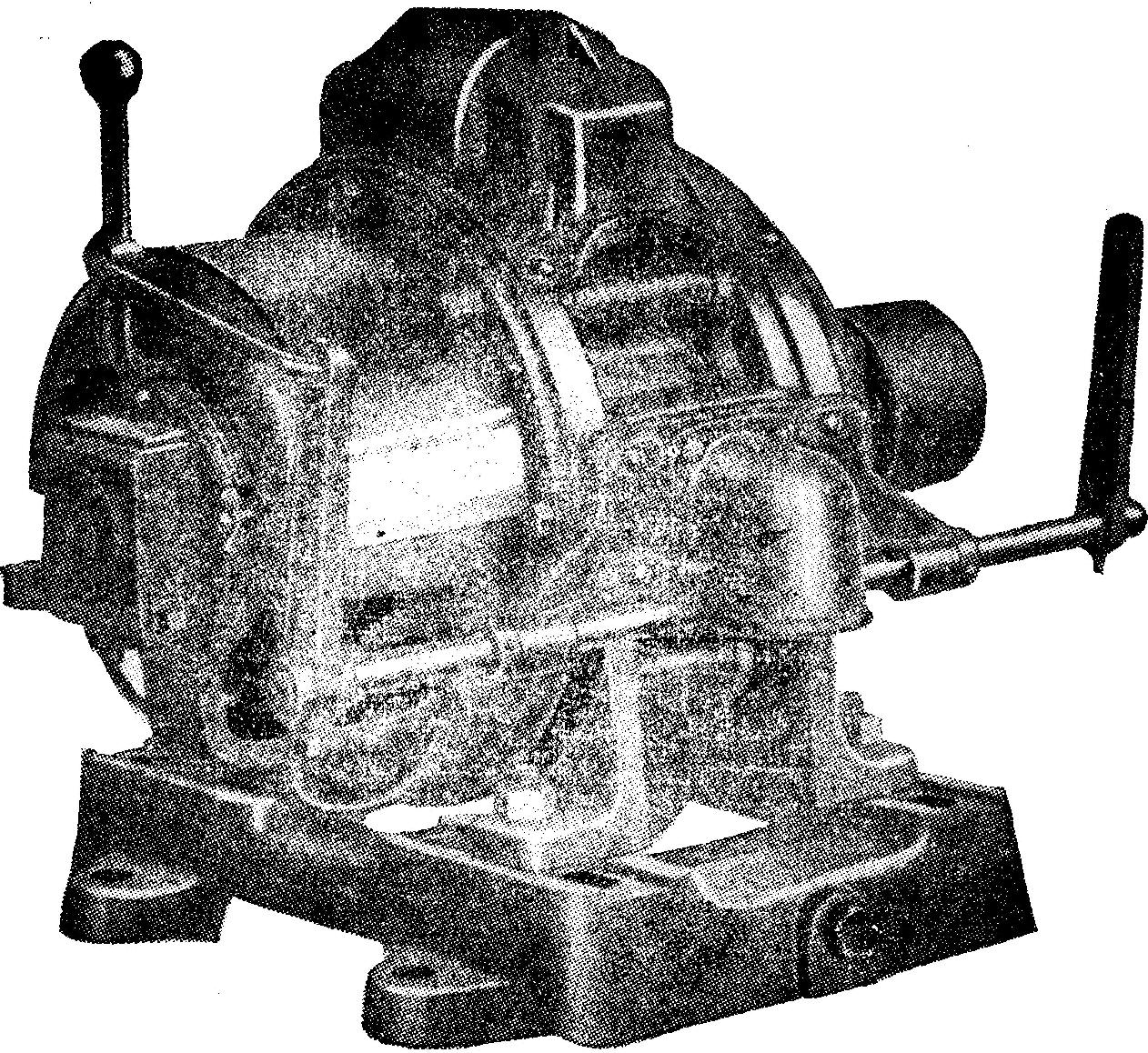
Le moteur à répulsion à vitesse réglable est de construction spéciale ; ordinairement du type à répulsion compensé, on règle la vitesse du moteur en déplaçant le plateau porte-balais, en poussant sur un bras et à distance en déplaçant le plateau porte-balais à l'aide d'une système de leviers.
À vide, la vitesse dépasse la vitesse synchrone et le déplacement des balais ne change pas autant la vitesse que lorsque le moteur est chargé.
Le rapport de variation de vitesse peut être de 3 à 1 et même de 4 à 1 suivant la charge.
Le couple au démarrage dépend jusqu'à un certain point de la position des balais sur le collecteur et il varie de 125% à 300%.
Usages
On se sert du moteur à répulsion à vitesse variable lorsqu'on a besoin d'une vitesse variable d'un sens de rotation réversible qu'on change en déplaçant les balais tel que vu précédemment.
Moteurs à répulsion réversible électriquement
On peut inverser le sens de rotation de tous les types de moteurs à répulsion en déplaçant les balais ; ce moyen n'est cependant pas pratique pour les applications à inversion rapide.
C'est pourquoi on construit:
a) Le moteur à répulsion réversible à deux groupes de balais court-circuités
Deux groupes de balais court-circuités sont placés respectivement à un certain angle de chaque côté de la ligne neutre.
Pour obtenir un sens de rotation on court-circuite un groupe de balais et on ouvre l'autre ; pour le sens de rotation inverse, on ouvre le premier groupe et court-circuite le second.
Ce moteur nécessite un commutateur ou un contrôleur spécial.
b) Le moteur à répulsion réversible avec enroulements spéciaux
Le stator du moteur à répulsion réversible comprend deux enroulements spéciaux simples ou un enroulement à courant triphasé spécial avec plusieurs fils de sortie reliés à un contrôleur permettant de changer l'axe du champ inducteur produit par l'enroulement du stator par rapport à l'axe du champ induit et ainsi d'inverser le sens de rotation.
C'est la même chose que si l'on déplaçait le stator d'un certain angle par rapport aux balais.
Ces deux dernières méthodes permettent le freinage électrique de tous les moteurs à répulsion, à l'exception du moteur à répulsion au démarrage et d'induction en marche qui doit arrêter ou ralentir suffisamment avant qu'on puisse inverser son sens de rotation car, à vitesse de régime, ce dernier moteur fonctionne comme un moteur à induction simple.
Moteurs à répulsion à double tension
L'enroulement du stator des moteurs à répulsion à double tension est divisé au centre en deux groupes de bobines.
On trouve quatre fils de sortie et chaque groupe de bobines peut supporter une tension déterminée. Pour une tension de 120v, on relie les deux groupes en parallèle et, pour une tension de 240v, les groupes en série.
On identifie les groupes avec une lampe d'essai, un ohm-mètre, etc., on les relie tel qu'expliqué et on alimente ensuite le moteur.
S'il ne démarre pas, on inverse les fils de sortie d'un groupe. On applique cette méthode à tous les moteurs à répulsion.
Moteur à répulsion synchrone
On construit deux types de moteur à répulsion synchrone; le moteur à répulsion avec rotor modifié comme celui d'un moteur d'induction synchrone à reluctance et le moteur à répulsion auquel on ajoute deux bagues reliées à 180° sur l'enroulement de l'induit pour un moteur bipolaire et à 90° pour un moteur tétrapolaire.
Le moteur démarre comme tout moteur à répulsion et, lorsqu'on court-circuite les bagues, il tourne à vitesse synchrone.
9. Moteur à répulsion induction (repulsion induction-motor)
Le moteur à répulsion induction ressemble au précédent sauf qu'il a une cage d'écureuil logée au-dessous de l'enroulement de l'induit (Fig. 85).
Fig. 85. — Moteur à répulsion induction
Ce moteur possède à la fois les caractéristiques d'un moteur à répulsion et celles d'un moteur d'induction:
au démarrage, son couple est énergique et l'intensité de son courant relativement faible ; mais en marche, grâce à la cage d'écureuil, sa vitesse s'avère plus constante que celle d'un moteur à répulsion.
Usages
Le moteur à répulsion induction s'adapte bien là où le couple au démarrage est grand et lorsque la charge irrégulière varie par secousses.
10. Moteur à répulsion au démarrage et d'induction en marche (repulsion start induction run motor)
Le stator du moteur à répulsion au démarrage et d'induction en marche comporte un enroulement à courant monophasé simple et le rotor est un induit comme celui d'une machine à courant continu.
Le moteur comprend des balais court-circuités, des porte-balais et un dispositif centrifuge pour court-circuiter le collecteur (Fig. 86).
Fig. 86. — Principe du moteur à répulsion au démarrage et d'induction en marche possède les caractéristiques.
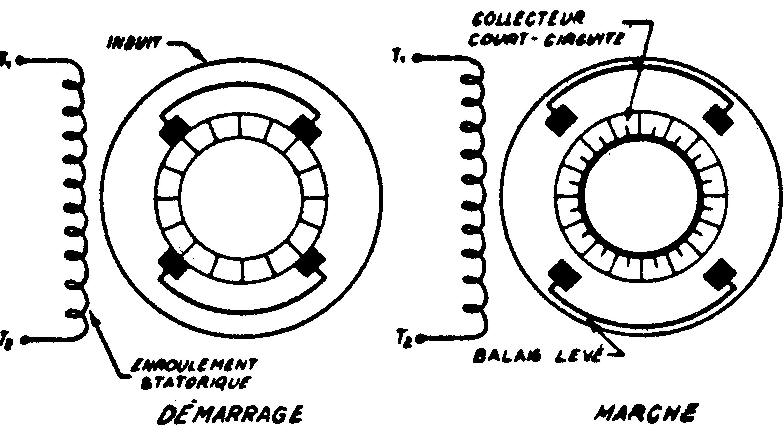
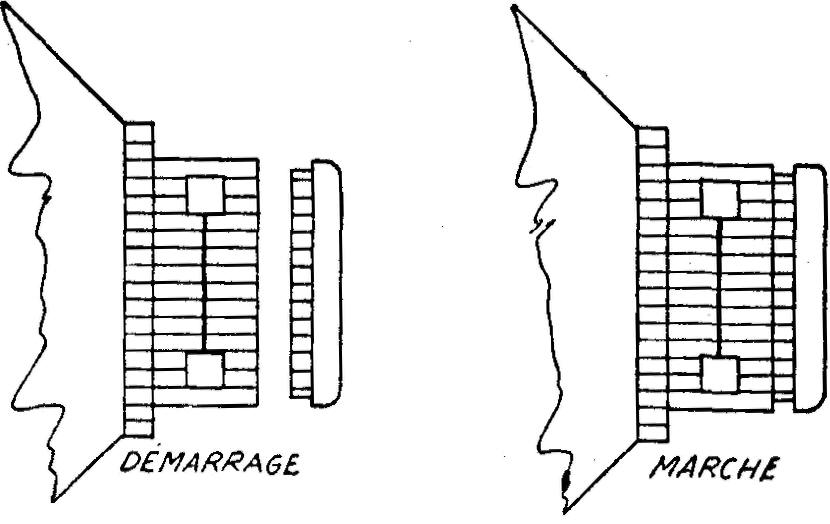
Il démarre comme un moteur à répulsion et, lorsque l'induit atteint environ 75% à 80% de sa vitesse de régime, un collier de segments de cuivre (short circuiting necklace) court-circuite le collecteur par la force centrifuge.
Le moteur fonctionne alors comme un moteur d'induction à rotor court-circuité et en possède les caractéristiques.
Tous les moteurs de ce genre fonctionnent sur le même principe mais leur construction diffère surtout en ce qui concerne le frottement et la pression des balais et les dispositifs centrifuges utilisés.
On peut circonscrire ces moteurs aux trois moteurs suivants:
a) « Master»
Le moteur Master démarre comme un moteur à répulsion (Fig. 87) lorsque la vitesse de son induit est suffisante; un collier de segments de cuivre, par la force centrifuge, court-circuite le collecteur. Les balais continuent à frotter sur le collecteur et la pression des ressorts reste la même.
Fig. 87. — Fonctionnement du moteur « Master »
b) « Leland »
Le moteur Leland démarre comme un moteur à répulsion et, lorsque la vitesse est suffisante, le collier de segments de cuivre court-circuite le collecteur (Fig. 88). Les balais continuent à frotter sur le collecteur et un dispositif centrifuge enlève la pression des ressorts sur les balais.
Fig. 88. — Moteur «Leland»
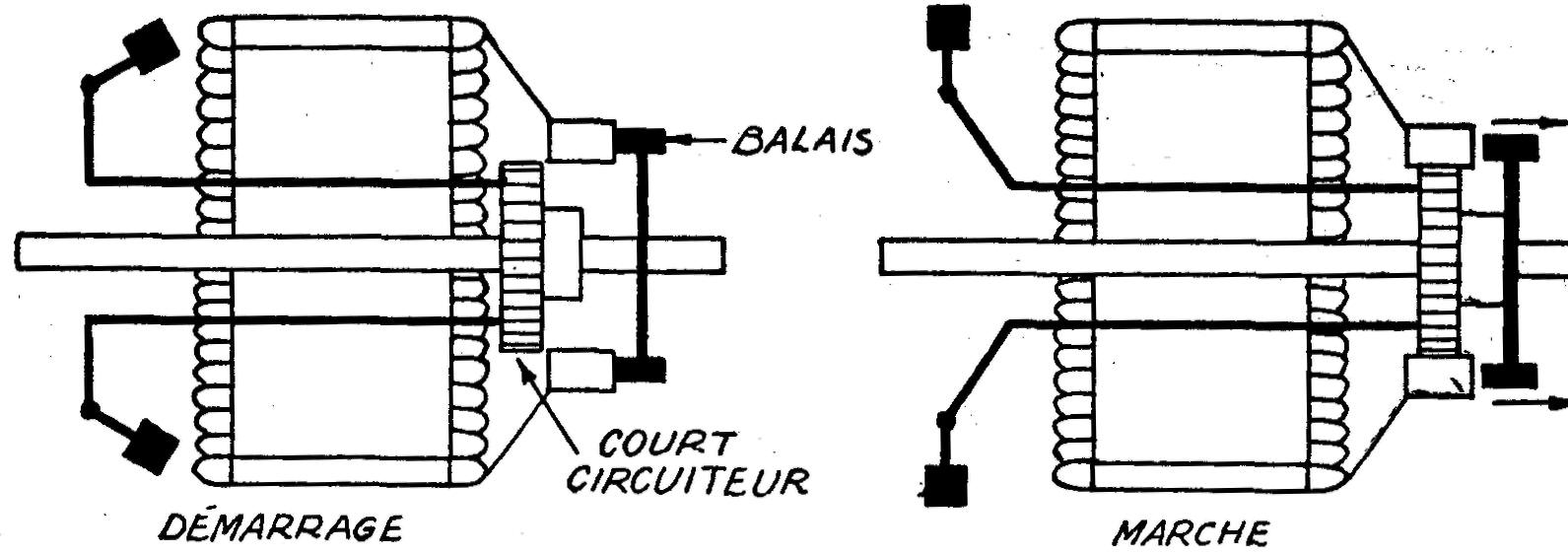
c) «Wagner »
Le moteur Wagner démarre comme
un moteur à répulsion et, lorsque la vitesse est suffisante, un dispositif
centrifuge comprenant deux poids, actionne, par la force centrifuge, des leviers
qui poussent le collier court-circuiteur vis-à-vis du collecteur et lèvent
complètement les balais (Fig. 89).
Fig. 89. — Principe du fonctionnement
du moteur « Wagner »
Un point important à souligner pour le bon fonctionnement de ces moteurs est de bien court-circuiter le collecteur lorsque la vitesse de l'induit atteint environ 75% à 80% de sa vitesse de régime.
Les balais peuvent continuer à frotter car cela ne change rien au fonctionnement du moteur, l'induit étant court-circuité.
Le seul but de la réduction de la pression ou du levage des balais est de diminuer l'usure de ces derniers et du collecteur et de rendre le moteur plus silencieux. Selon le genre de construction, les balais frottent sur le dessus ou sur le bout du collecteur.
Au démarrage, le couple est de 300% à 500% du couple de marche et l'intensité du courant est de 200% à 350% du courant de régime. En marche, la vitesse demeure à peu près constante.
Sens de rotation et position des balais
On inverse le sens de rotation des moteurs à répulsion au démarrage et d'induction en marche en déplaçant les balais à un endroit indiqué sur le moteur.
Dans ces moteurs le déplacement est minime, soit de 15° à 20°.
La position exacte des balais s'avère très importante car, si les balais sont en mauvaise position au démarrage, il se produira un étincellement excessif et un surchauffage.
Le couple sera faible et la vitesse instable ; celle-ci augmentera et diminuera à plusieurs reprises et l'induit n'atteindra pas sa vitesse normale.
Usages
On utilise le moteur à répulsion au démarrage et d'induction en marche pour des applications générales d'inertie moyenne nécessitant un couple de démarrage énergique et une vitesse constante car ce moteur est construit pour avoir un temps de démarrage relativement court ; s'il y a trop d'inertie le temps de démarrage se prolonge et il y a surchauffage et étincellement: ceci, à la longue, endommage le collecteur et brûle même le moteur.
On utilise ces moteurs pour la commande de réfrigérateurs, de compresseurs, etc.
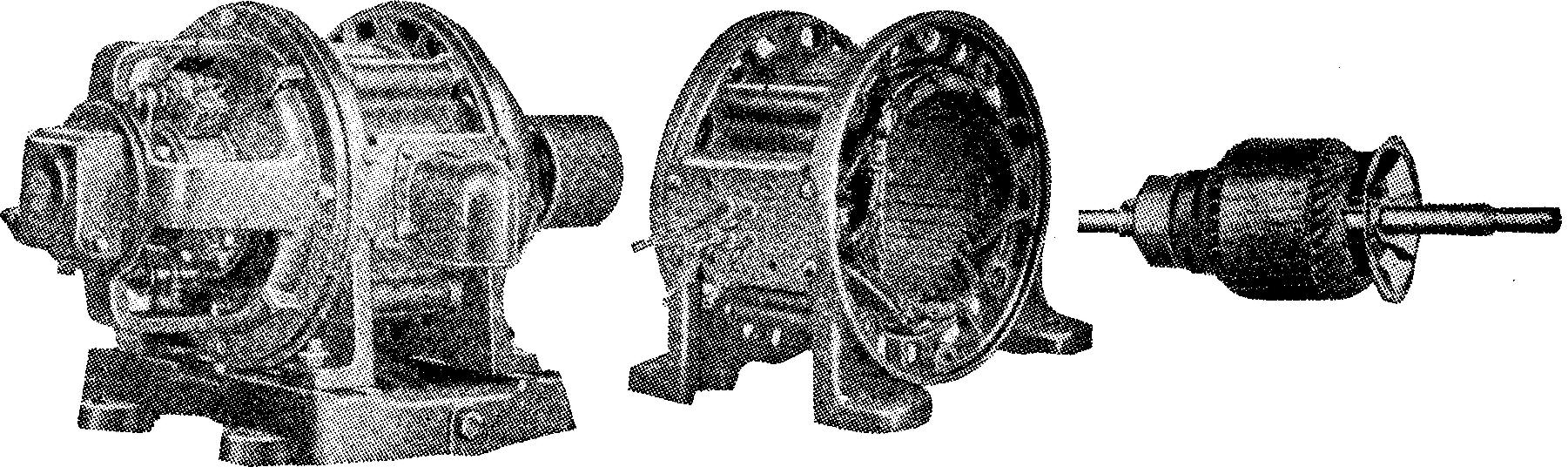
11. Moteur-série (series-motor)
Le moteur-série comporte un inducteur, un induit, des balais et des porte-balais reliés en série (Fig. 90 et 91).
Fig. 90. — Moteur-série
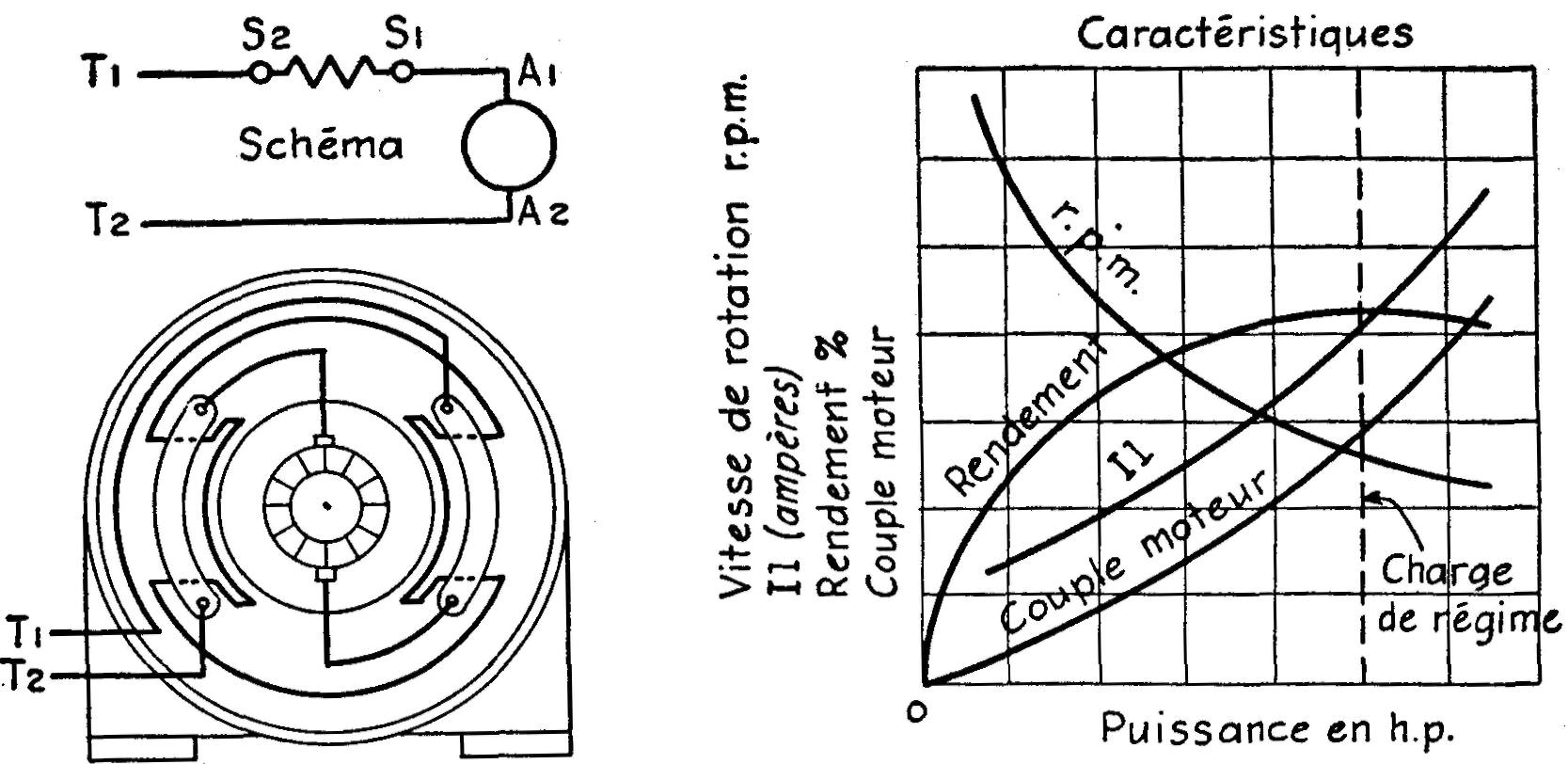
Fig. 91. — Moteur-série et perceuse portative
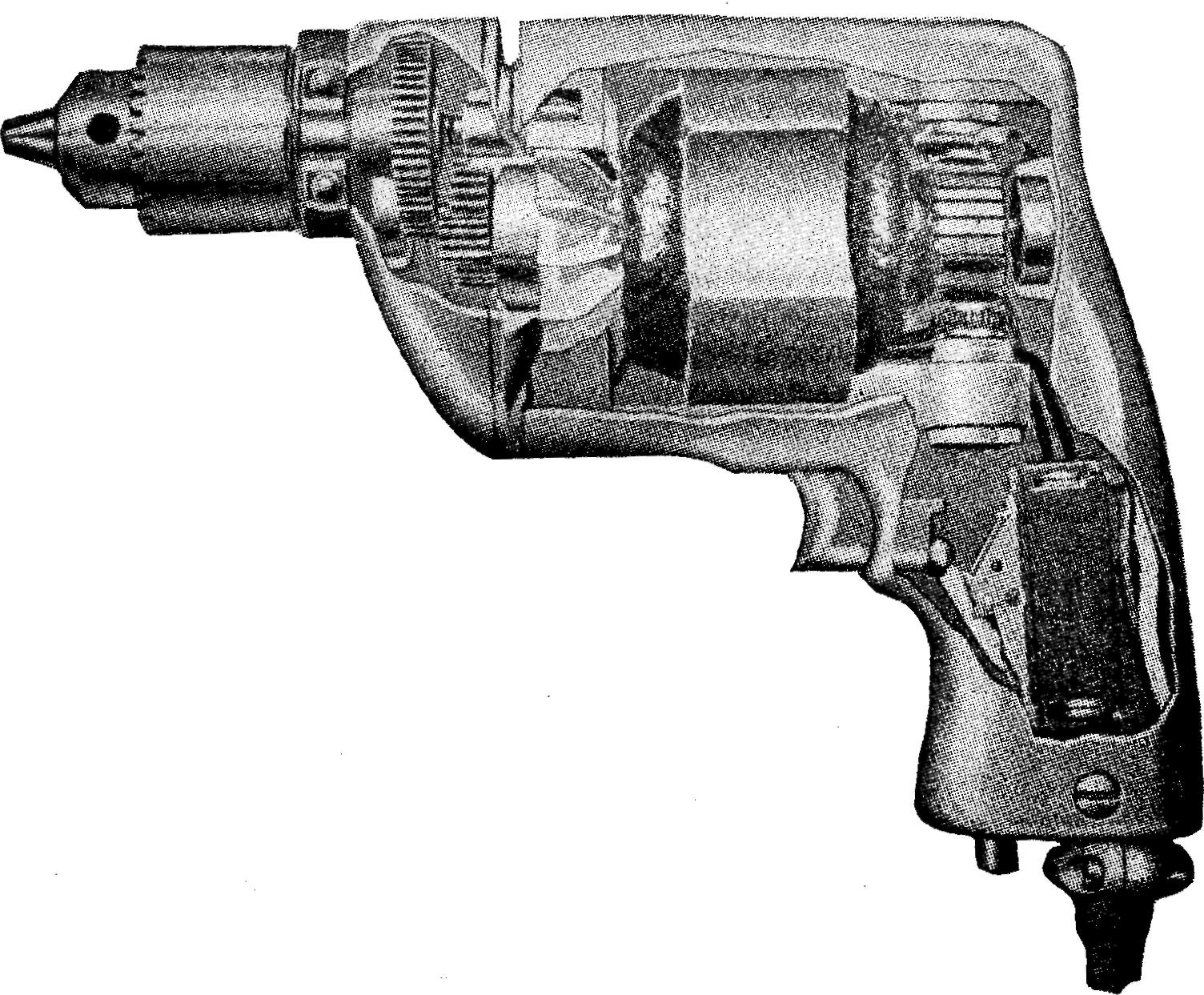
L'enroulement inducteur se compose de quelques spires de gros fil car, étant en série avec l'induit, il supporte continuellement le courant total du moteur.
Le courant intense de démarrage passe à la fois dans l'inducteur et dans l'induit.
On a alors, agissant l'un sur l'autre, deux champs magnétiques très intenses qui produisent un couple de démarrage très énergique. Le couple d'un moteur-série est sensiblement proportionnel au carré de l'intensité du courant.
Ainsi, au démarrage, si le courant est le double du courant de marche le couple est quatre fois plus grand que le couple de marche en charge normale.
La vitesse de ce moteur change inversement avec la charge. Lorsque la charge augmente, la vitesse diminue rapidement et, Le moteur-série est le seul moteur qui fonctionne à la fois sur le courant continu et sur le courant alternatif.
Toutefois, un moteur-série à courant continu ne fonctionne pas bien sur le courant alternatif.
Le moteur-série à courant alternatif ou moteur universel possède un stator feuilleté afin de réduire l'hystérésis et les courants de Foucault.
On a réduit le nombre de spires de l'enroulement inducteur et augmenté celui de l'induit. Comme la réaction de l'induit est plus grande sur le courant alternatif, on ajoute, pour la neutraliser, un enroulement compensateur sur le stator des moteurs de moyenne puissance.
La commutation s'avère aussi plus difficile car l'étincellement est plus grand. Pour l'améliorer, on utilise des balais plus résistants, on ajoute même des fils résistants à l'induit, on augmente le nombre de pôles ou on ajoute des pôles de commutation.
Réglage de la vitesse
Il existe trois modes de réglage de la vitesse d'un moteur-série.
a) On règle la vitesse d'un moteur-série en déplaçant les balais, méthode utilisée pour certains petits moteurs;
b) On varie le nombre de spires de l'enroulement inducteur, pour un moteur de construction spéciale ayant un inducteur avec plusieurs fils reliés à un commutateur permettant de changer le nombre de spires de l'enroulement inducteur;
c) On varie la tension appliquée aux bornes du moteur; pour cela on utilise un rhéostat, une bobine de self ou un transformateur variable.
Cette dernière méthode est la plus en usage.
Régulateur automatique de vitesse
Il y a plusieurs sortes de régulateurs automatiques pour les petits moteurs-série mais leur fonctionnement se résume à celui d'un régulateur qui comprend deux contacts, une résistance, deux bagues avec balais et un condensateur (Fig. 92).
Fig. 92. — Moteur-série avec régulateur automatique de vitesse
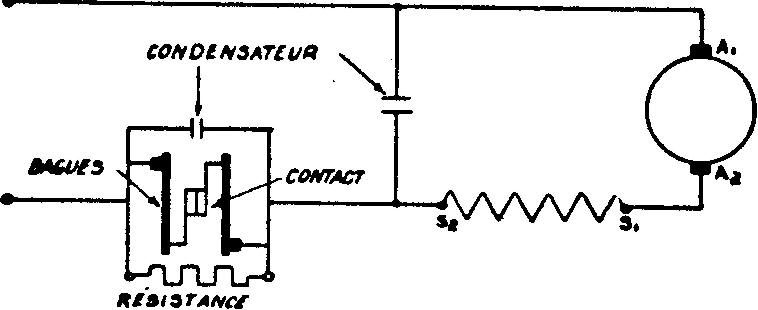
Lorsque la vitesse dépasse une certaine valeur, sous l'effet de la force centrifuge, les contacts s'ouvrent et la résistance en série avec le moteur réduit la tension appliquée aux bornes et la vitesse.
Dès que la vitesse a baissé suffisamment, les contacts se ferment et court-circuitent la résistance ce qui a pour résultat d'augmenter la tension appliquée aux bornes ainsi que la vitesse du moteur.
Ce processus se répète continuellement et rapidement :
la vitesse augmente et diminue à chaque fois, mais la vitesse moyenne reste à peu près constante et se règle en variant la distance entre les contacts ou la position du poids de réglage, s'il y en a un.
Le condensateur réduit l'étincellement aux contacts.
Sens de rotation
Pour inverser le sens de rotation de ce moteur avec les balais sur la ligne neutre, on inverse le sens du courant dans l'induit ou dans l'enroulement inducteur ou, encore, on déplace les balais.
Certains petits moteurs sont construits avec des balais déplacés de quelques degrés de la ligne neutre.
Si l'on change le sens de rotation en inversant le sens du courant dans l'induit ou dans l'inducteur sans déplacer les balais de la même distance du côté opposé de la ligne neutre, il y a étincellement excessif et le moteur s'avère faible au démarrage.
Moteur-série compensé. Le moteur-série compensé possède un enroulement compensateur ajouté à l'enroulement inducteur ordinaire sur le stator.
On peut relier l'enroulement compensateur en série avec l'induit et avec l'enroulement inducteur ou le court-circuiter à lui-même: tout dépend de sa construction.
Usages
Le moteur-série est le moteur de traction par excellence en raison de son fort couple de démarrage.
Il tourne aux plus grandes vitesses et on l'utilise pour un grand nombre de machines-outils portatives comme les perceuses, les scies rondes, les sableuses, etc., ainsi que pour les balayeuses, les machines à coudre, les éventails, les malaxeurs, les caisses enregistreuses, les machines comptables, les projecteurs, etc.

![]()